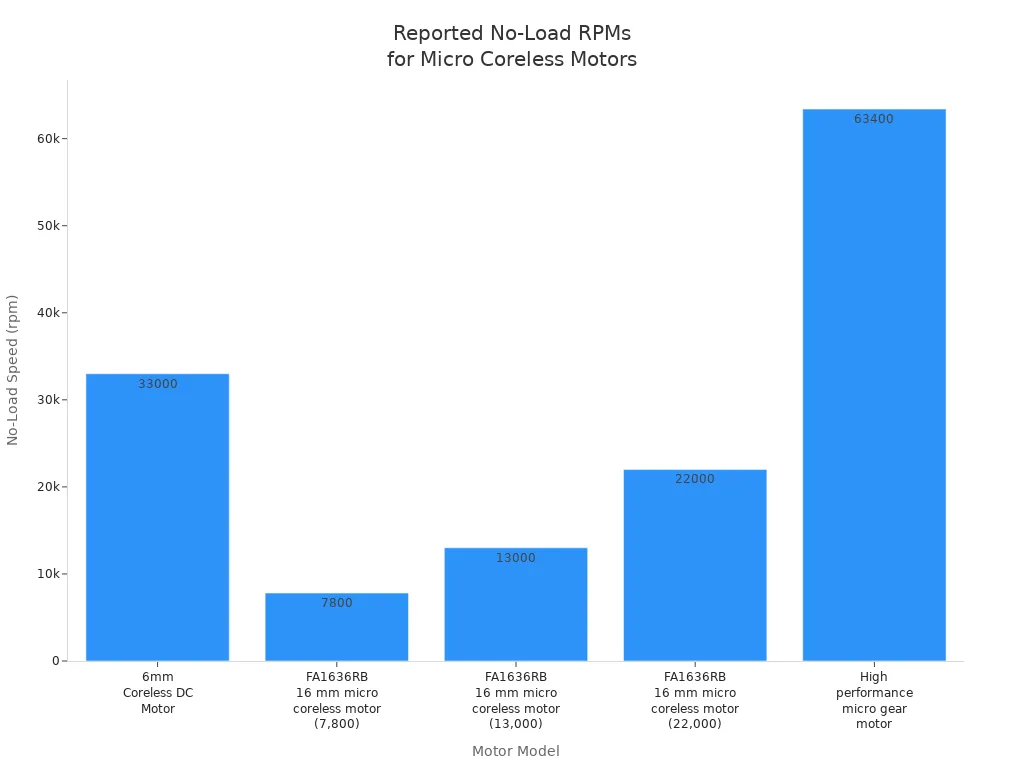
Du oplever ofte, at en mikrokerneløs motor roterer ved hastigheder fra omkring 20.000 til 66.000 rpm, når den drives af 3 til 4 volt. Rpm står for omdrejninger per minut, som fortæller dig, hvor hurtigt motorens aksel drejer. Denne hastighed har betydning, fordi den påvirker, hvor meget strøm din enhed kan levere. For eksempel viser tabellen nedenfor virkelige omdrejningstal for forskellige modeller.
Model |
No-load hastighed (rpm) |
6 mm kerneløs jævnstrømsmotor |
33.000 ± 10 % |
FA1636RB 16 mm mikrokerneløs motor |
7.800, 13.000, 22.000, 22.000 |
Højtydende mikrogearmotor |
63.400 |
Nøgle takeaways
Mikrokerneløse motorer drejer normalt fra 20.000 til 66.000 omdr./min. De skal bruge 3 til 4 volt for at virke. Se på specifikationerne for at kende din motors nøjagtige hastighed.
No-load rpm er højere end loaded rpm. Hvis du tilføjer vægt eller modstand, sænker motoren farten. Tænk altid på belastningen, når du vælger en motor til dit projekt.
At give motoren mere spænding gør, at den roterer hurtigere. Brug den rigtige spænding, så du ikke ødelægger motoren. Dette hjælper dig med at få den hastighed, du ønsker.
Brug en omdrejningstæller til at kontrollere motorens omdrejningstal nøjagtigt. Du kan også bruge gør-det-selv-måder som optiske sensorer eller apps til at kontrollere hastigheden.
At vælge det rigtige omdrejningstal er meget vigtigt for din enhed. Forskellige ting, som droner eller medicinsk udstyr, har brug for bestemte hastigheder for at fungere bedst.
Micro Coreless Motor RPM-område
Typiske RPM-værdier
Du kan finde en lang række rpm-værdier, når du ser på mikro kerneløse motorer . De fleste modeller kører mellem 20.000 og 66.000 rpm, når de drives af 3 til 4 volt. Nogle motorer designet til RC-droner eller højhastighedsapplikationer når endnu højere hastigheder. Her er nogle eksempler:
En mikrokerneløs motor, der bruges i RC-droner, kan nå op til 10.230 rpm ved 24 volt med en kontinuerlig strøm på 566mA.
Mange standard mikrokerneløse motorer spinder ved 33.000 o/min eller mere under ubelastede forhold.
Højtydende modeller kan opnå hastigheder over 50.000 rpm.
Du bør altid tjekke specifikationerne for din motor. Producenter angiver den ubelastede hastighed, som viser, hvor hurtigt motoren roterer uden nogen modstand.
No-Load vs. Loaded RPM
Når du bruger en mikrokerneløs motor, vil du bemærke en forskel mellem ubelastet omdrejningstal og belastet omdrejningstal. No-load rpm betyder, at motoren roterer frit, uden at noget bremser den. Belastede omdrejninger sker, når du tilslutter en propel, gear eller anden enhed, der skaber modstand.
Omdrejningstallet falder, når du tilføjer en belastning, fordi motoren arbejder hårdere for at overvinde modstand. Den bageste EMF (elektromotorisk kraft) falder, hvilket sænker hastigheden. Motoren sænker farten, indtil strøm og moment balancerer med belastningen.
Her er hvad du kan forvente:
No-load rpm er altid højere end loaded rpm.
Hastigheden falder, når du øger belastningen.
Det nøjagtige fald afhænger af belastningens størrelse og motorens design.
Hvis du vil have din enhed til at køre med en bestemt hastighed, skal du overveje både ubelastet og belastet omdrejningstal. Dette hjælper dig med at vælge den rigtige mikrokerneløse motor til dit projekt.
Faktorer, der påvirker RPM
Spændingspåvirkning
Spændingen du leverer til en mikrokerneløs motor har en stor effekt på dens hastighed. Når du øger spændingen, stiger omdrejningstallet. Hvis du sænker spændingen, roterer motoren langsommere. De fleste mini DC-motorer fungerer bedst mellem 1,5 og 100 volt. Fælles valg er 3V, 6V eller 12V. Hvis du for eksempel bruger et 3V batteri, vil motoren rotere med en bestemt hastighed. Skifter du til et 6V batteri, vil omdrejningstallet stige. Dette sker, fordi mere spænding skubber mere strøm gennem motoren, hvilket får den til at dreje hurtigere.
Tip: Kontroller altid den anbefalede spænding for din motor. For meget spænding kan beskadige den, mens for lidt måske ikke giver nok hastighed.
Indlæs effekter
Belastningen er alt, hvad motoren skal bevæge sig, såsom en propel eller et gear. Når du tilføjer en belastning, falder omdrejningstallet. Motoren arbejder hårdere for at vende den ekstra vægt. Hvis du tilføjer en tung belastning, falder hastigheden endnu mere. For eksempel kan en mikrokerneløs motor, der roterer frit, nå 33.000 rpm. Hvis du tilslutter en lille blæser, kan hastigheden falde til 28.000 rpm. En større blæser ville bremse den endnu mere.
Du bør altid tænke på belastningen, når du vælger en motor til dit projekt.
Motor design
Motorens design påvirker også dens omdrejningstal. En mikrokerneløs motor bruger en let, kerneløs spole. Dette design giver det nogle specielle funktioner:
Hurtig acceleration og høj effektivitet på grund af den lette konstruktion
Lav inerti, hvilket betyder, at motoren reagerer hurtigt på ændringer i hastigheden
Jævn og stabil drift takket være reduceret tandhjulsmoment
Høj effekt i en lille størrelse, hvilket hjælper på trange pladser
Motorer med stærke magneter, specielle viklingstyper og små rotorer kan rotere hurtigere. Det kerneløse design betyder også mindre støj og en jævnere hastighedskurve. Du vil se disse fordele i enheder som droner, medicinske værktøjer og robotteknologi, hvor hastighed og kontrol betyder mest.
Måling af RPM
Brug af omdrejningstæller
En omdrejningstæller hjælper dig med at finde ud af, hvor hurtigt en motor drejer. Dette værktøj viser hastigheden med det samme og er meget nøjagtigt. Nogle digitale omdrejningstællere bruger en laser til at kontrollere bevægelser. Du peger laseren mod et skinnende sted på motoren. Skærmen viser så rpm-tallet. Disse omdrejningstællere kan måle hastigheder fra 10 til 99.999 o/min. De arbejder fra omkring 50 mm til 200 mm væk. Du behøver ikke røre ved motoren, så der er ingen ekstra træk.
Feature |
Beskrivelse |
Type |
Berøringsfri digital omdrejningstæller |
RPM-måleområde |
10,0 til 99.999 RPM |
Målemetode |
Ikke-påtrængende, ved hjælp af laser |
Vise |
LCD-baggrundsbelysning, viser RPM og omdrejningstal |
Målafstand |
50 mm til 200 mm |
Batterilevetid |
Kontinuerlig drift i 12 timer |
Hvis du har brug for mere nøjagtige resultater, kan du bruge en DC-omdrejningstællergenerator. Dette værktøj ændrer rotationshastigheden til et spændingssignal. Det er godt til laboratorier og servosystemer.
DIY metoder
Du kan tjekke omdrejninger derhjemme eller i klassen på mange måder. Du kan bruge en optisk sensor til at spotte mærker på det roterende skaft. Du kunne bygge en omdrejningstæller med tællere og LED-tal. Nogle telefonapps bruger dit kamera til at finde ud af rpm.
Tip: Optiske sensorer og telefonapps er hurtige og nemme at bruge. Du behøver ikke specialværktøj, og opsætningen er enkel.
Du kan også bruge en nærhedssensor eller tjekke EMF på bagsiden for en billig måde at måle hastighed på. At tælle med et hurtigt ur hjælper dig med at få gode resultater, selv ved lave hastigheder.
Beregning ud fra Specs
Du kan gætte omdrejninger pr. minut ved at bruge Kv-klassificeringen og den spænding, du bruger. Kv-klassificeringen fortæller dig, hvor mange gange motoren drejer for hver volt. Her er en simpel formel:
RPM = Kv × Spænding
For eksempel, hvis din motor har en Kv på 1000, og du bruger 10 volt, er omdrejningstallet 10.000. Hvis du har en 2300Kv motor og et 14,8V batteri, er omdrejningstallet omkring 34.040. Se altid på producentens data for at få det bedste svar. På denne måde kan du kende hastigheden, før du tænder for din mikrokerneløse motor.
Hvorfor RPM betyder noget
Præstation
RPM er vigtigt for, hvor godt din motor fungerer. Hvis du bruger en mikrokerneløs motor, vil du gerne have, at den bevæger sig hurtigt og jævnt. Et højere omdrejningstal lader motoren reagere hurtigt. Dette er godt til ting, der kræver hastighed og nøjagtighed, som robotter eller små gadgets. Tabellen nedenfor viser, hvordan rpm ændrer ydeevnen:
Specifikation |
Værdi |
Nominel spænding |
3,0V |
Nominel hastighed |
14.000 ± 2.500 o/min |
Dimensioner |
11,9 mm x 4,6 mm x 4,9 mm |
Anvendelsesegnethed |
Robotik og miniaturiserede elektroniske enheder |
Indvirkning på ydeevne |
Højere RPM fører til hurtigere aktivering og reaktionsevne, afgørende for præcision og hurtig bevægelse. |
Du får mere end bare fart med disse motorer. Mikrokerneløse motorer starter og stopper hurtigt. De giver stærk kraft i en lille størrelse. De kører jævnt, så du nemt kan kontrollere dem. Disse motorer håndterer også varme godt, hvilket hjælper dem med at holde længere.
Feature |
Forklaring |
Rotationshastighed |
Går op med flere input-impulser; langsomme hastigheder kan give problemer. |
Belastningsmomentpåvirkning |
Kraftig belastning får motoren til at rotere langsommere. |
Spændingsapplikation |
Mere spænding får motoren til at snurre hurtigere. |
Bemærk: Høje omdrejninger kan betyde mindre drejningsmoment og mere strømforbrug. Du skal balancere hastighed med styrke og effektivitet.
Ydelsesfaktor |
Beskrivelse |
Højt omdrejningstal |
Kerneløse motorer kan gå meget hurtigt, men skal bruges omhyggeligt for at undgå skader. |
Moment |
Hvis omdrejningstallet stiger, kan drejningsmomentet falde. |
Strømforbrug |
Hurtigere hastigheder bruger mere strøm, hvilket kan sænke effektiviteten. |
Application Fit
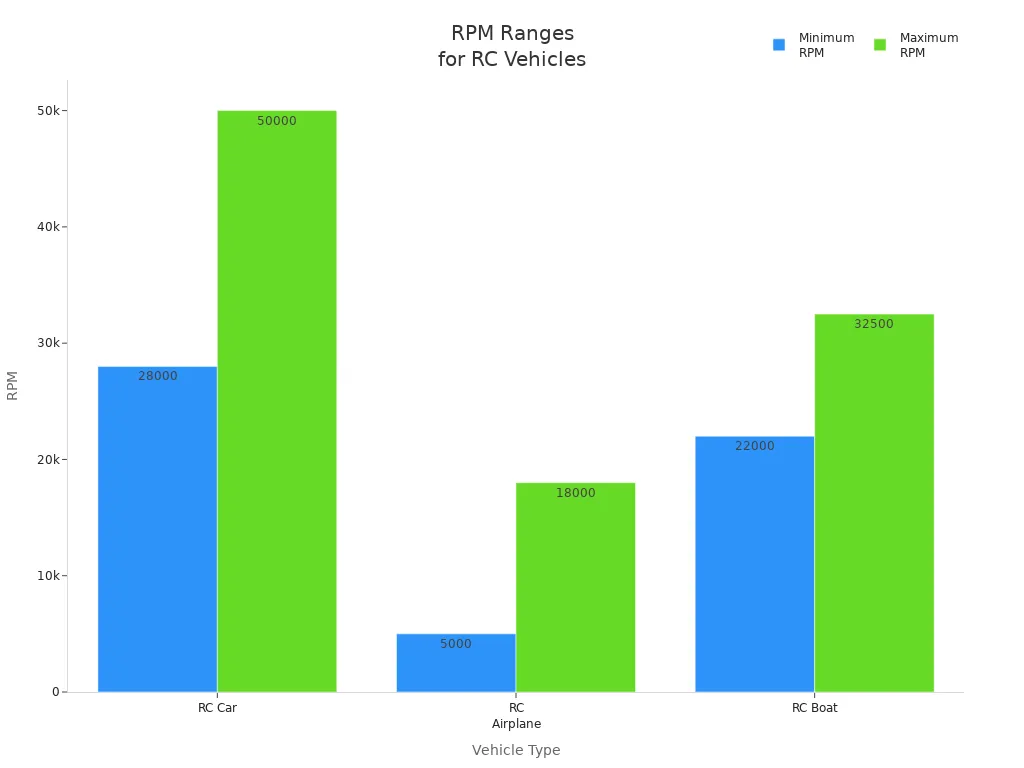
Du skal vælge det rigtige omdrejningstal til dit projekt. Forskellige enheder har brug for forskellige hastigheder. Droner har brug for høje omdrejninger i minuttet for at snurre hurtigt og løfte sig. Medicinsk udstyr har brug for motorer, der er støjsvage og stabile. Legetøj har brug for motorer, der er sikre og ikke for hurtige. Tabellen nedenfor viser, hvordan rpm passer til hver brug:
Anvendelse |
RPM område |
Nøglefunktioner |
Droner |
Op til 30.000 |
Højt kraft-til-vægt-forhold, let, høj effektivitet til længere flyvning. |
Medicinsk udstyr |
Varierer |
Lav støj, præcis kontrol, pålidelighed til kritiske opgaver. |
Legetøj |
Op til 33.000 |
Kompakt størrelse, effektiv betjening til fjernbetjening og modeller. |
Droner: Høje omdrejninger hjælper dem med at løfte og bevæge sig hurtigt.
Medicinsk udstyr: Lavere rpm holder dem stille og stabile.
Legetøj: Mellem omdrejningstal gør dem sjove og sikre.
Tjek altid, hvilket omdrejningstal dit projekt har brug for. At vælge den rigtige hastighed hjælper din enhed med at fungere godt og holde længere.
Du har lært, at mikrokerneløse motorer spinder fra 20.000 til 66.000 o/min. Hastigheden afhænger af spænding, belastning og hvordan motoren er bygget. Se altid på databladet for at finde det nominelle omdrejningstal. Du bør også måle hastigheden for dit projekt. Tabellen nedenfor viser hovedpunkterne:
Nøgleaspekt |
Detaljer |
RPM område |
20.000–66.000 rpm typisk |
Påvirkningsfaktorer |
Spænding, belastning, motordesign |
Måling |
Omdrejningstæller, gør-det-selv eller beregning |
Application Fit |
Droner, medicin, robotter, legetøj |
Sørg for, at omdrejningstallet matcher det, dit projekt har brug for. At vælge den rigtige kv og tjekke specifikationerne kan stoppe motorproblemer.
FAQ
Hvad betyder 'kerneløs' i en mikromotor?
En kerneløs motor bruger en spole uden en jernkerne. Du får hurtigere respons og mindre vægt. Dette design hjælper motoren med at rotere hurtigt og jævnt.
Kan du styre omdrejningstallet på en mikrokerneløs motor?
Ja, du kan styre rpm ved at ændre spændingen eller bruge en motorstyring. Lavere spænding bremser motoren. Højere spænding får den til at dreje hurtigere.
Hvorfor falder omdrejningstallet, når du tilføjer en belastning?
Når du tilføjer en belastning, arbejder motoren hårdere. Hastigheden falder, fordi motoren har brug for mere kraft for at dreje den ekstra vægt. Du ser lavere omdrejninger ved tungere belastninger.
Hvordan ved du, om din motor drejer for hurtigt?
Du kan mærke ekstra varme, støj eller vibrationer. Motoren holder måske ikke så længe. Kontroller altid producentens omdrejningsgrænse for at holde din motor sikker.
Hvad sker der, hvis du bruger for meget spænding?
For meget spænding kan overophede motoren. Du kan beskadige viklingerne eller forkorte motorens levetid. Brug altid den anbefalede spænding for sikker drift.