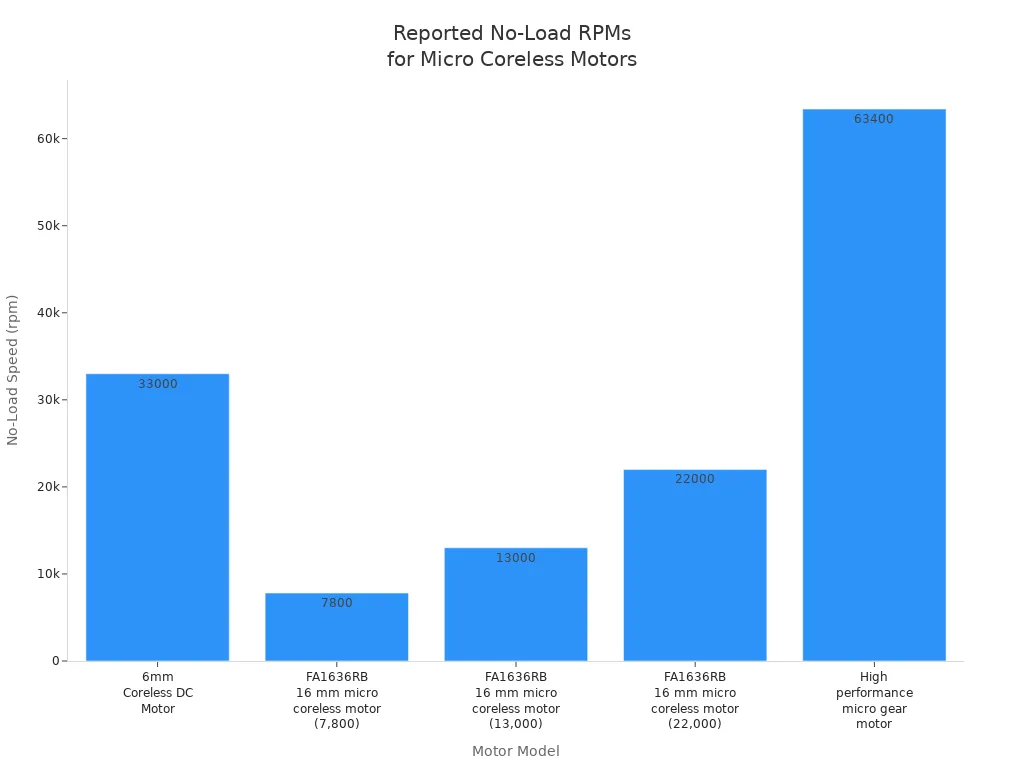
คุณมักจะพบว่าก มอเตอร์ไร้แกนขนาดเล็ก หมุนด้วยความเร็วประมาณ 20,000 ถึง 66,000 รอบต่อนาที เมื่อใช้พลังงานจาก 3 ถึง 4 โวลต์ Rpm ย่อมาจากการปฏิวัติต่อนาที ซึ่งบอกคุณว่าเพลาของมอเตอร์หมุนเร็วแค่ไหน ความเร็วนี้มีความสำคัญเนื่องจากส่งผลต่อปริมาณพลังงานที่อุปกรณ์ของคุณสามารถจ่ายได้ ตัวอย่างเช่น ตารางด้านล่างแสดงตัวเลข rpm จริงสำหรับรุ่นต่างๆ
แบบอย่าง |
ความเร็วรอบขณะเดินเครื่องเปล่า (รอบต่อนาที) |
มอเตอร์กระแสตรงไร้คอร์ขนาด 6 มม |
33,000 ± 10% |
FA1636RB มอเตอร์ไมโครคอร์ไร้แกนขนาด 16 มม |
7,800, 13,000, 22,000, 22,000 |
มอเตอร์เกียร์ไมโครประสิทธิภาพสูง |
63,400 |
ประเด็นสำคัญ
มอเตอร์ไร้แกนขนาดเล็กมักจะหมุนตั้งแต่ 20,000 ถึง 66,000 รอบต่อนาที พวกเขาต้องการไฟ 3 ถึง 4 โวลต์ในการทำงาน ดูข้อมูลจำเพาะเพื่อทราบความเร็วที่แน่นอนของมอเตอร์
รอบต่อนาทีขณะไม่มีโหลดสูงกว่ารอบต่อนาทีที่โหลด หากคุณเพิ่มน้ำหนักหรือแรงต้าน มอเตอร์จะช้าลง ควรคำนึงถึงภาระเมื่อเลือกมอเตอร์สำหรับโครงการของคุณ
การเพิ่มแรงดันไฟฟ้าให้มอเตอร์ทำให้หมุนเร็วขึ้น ใช้แรงดันไฟฟ้าที่เหมาะสมเพื่อไม่ให้มอเตอร์พัง สิ่งนี้จะช่วยให้คุณได้ความเร็วที่ต้องการ
ใช้เครื่องวัดวามเร็วเพื่อตรวจสอบรอบต่อนาทีของมอเตอร์อย่างแม่นยำ คุณยังใช้วิธี DIY เช่นเซ็นเซอร์ออปติคัลหรือแอปเพื่อตรวจสอบความเร็วได้อีกด้วย
การเลือกรอบต่อนาทีที่ถูกต้องเป็นสิ่งสำคัญมากสำหรับอุปกรณ์ของคุณ สิ่งต่างๆ เช่น โดรนหรืออุปกรณ์ทางการแพทย์ จำเป็นต้องมีความเร็วที่แน่นอนจึงจะทำงานได้ดีที่สุด
ช่วง RPM ของมอเตอร์ไร้คอร์ขนาดเล็ก
ค่า RPM ทั่วไป
คุณสามารถดูค่า rpm ได้หลากหลายเมื่อดู มอเตอร์ไมโครคอร์เล ส รุ่นส่วนใหญ่ทำงานที่ระหว่าง 20,000 ถึง 66,000 รอบต่อนาทีเมื่อใช้ไฟ 3 ถึง 4 โวลต์ มอเตอร์บางตัวที่ออกแบบมาสำหรับโดรน RC หรือการใช้งานความเร็วสูงจะมีความเร็วที่สูงกว่าอีกด้วย นี่คือตัวอย่างบางส่วน:
มอเตอร์ไร้แกนขนาดเล็กที่ใช้ในโดรน RC สามารถเข้าถึงความเร็วสูงสุด 10,230 รอบต่อนาทีที่ 24 โวลต์ โดยมีกระแสไฟฟ้าต่อเนื่องที่ 566mA
มอเตอร์ไมโครคอร์ไร้แกนมาตรฐานหลายตัวหมุนที่ 33,000 รอบต่อนาทีขึ้นไปภายใต้สภาวะที่ไม่มีโหลด
รุ่นประสิทธิภาพสูงอาจมีความเร็วเกิน 50,000 รอบต่อนาที
คุณควรตรวจสอบข้อมูลจำเพาะสำหรับมอเตอร์ของคุณเสมอ ผู้ผลิตระบุความเร็วรอบขณะเดินเครื่องเปล่า ซึ่งจะแสดงความเร็วของมอเตอร์หมุนโดยไม่มีความต้านทานใดๆ
ไม่มีโหลดเทียบกับ RPM ที่โหลด
เมื่อคุณใช้มอเตอร์ไมโครคอร์เลส คุณจะสังเกตเห็นความแตกต่างระหว่างรอบต่อนาทีที่ไม่โหลดและรอบต่อนาทีที่โหลด รอบต่อนาทีขณะไม่มีโหลดหมายความว่ามอเตอร์หมุนได้อย่างอิสระโดยไม่มีอะไรทำให้ช้าลง รอบต่อนาทีที่โหลดเกิดขึ้นเมื่อคุณติดใบพัด เกียร์ หรืออุปกรณ์อื่นที่สร้างแรงต้าน
รอบต่อนาทีจะลดลงเมื่อคุณเพิ่มโหลดเนื่องจากมอเตอร์ทำงานหนักขึ้นเพื่อเอาชนะแรงต้าน EMF ด้านหลัง (แรงเคลื่อนไฟฟ้า) ลดลง ซึ่งจะทำให้ความเร็วลดลง มอเตอร์จะช้าลงจนกระแสและแรงบิดสมดุลกับโหลด
นี่คือสิ่งที่คุณคาดหวังได้:
รอบต่อนาทีขณะไม่มีโหลดจะสูงกว่ารอบต่อนาทีที่โหลดเสมอ
ความเร็วจะลดลงเมื่อคุณเพิ่มภาระ
การลดลงที่แน่นอนขึ้นอยู่กับขนาดของโหลดและการออกแบบของมอเตอร์
หากคุณต้องการให้อุปกรณ์ของคุณทำงานด้วยความเร็วที่แน่นอน คุณต้องพิจารณาทั้งรอบต่อนาทีที่ไม่โหลดและโหลด ซึ่งจะช่วยให้คุณเลือกมอเตอร์ไมโครไร้คอร์ที่เหมาะกับโครงการของคุณได้
ปัจจัยที่ส่งผลต่อ RPM
ผลกระทบจากแรงดันไฟฟ้า
แรงดันไฟฟ้าที่คุณจ่ายให้กับมอเตอร์ไมโครคอร์เลสมีผลกระทบอย่างมากต่อความเร็วของมัน เมื่อคุณเพิ่มแรงดันไฟฟ้า รอบต่อนาทีจะเพิ่มขึ้น หากคุณลดแรงดันไฟฟ้า มอเตอร์จะหมุนช้าลง มอเตอร์มินิ DC ส่วนใหญ่ทำงานได้ดีที่สุดระหว่าง 1.5 ถึง 100 โวลต์ ตัวเลือกทั่วไปคือ 3V, 6V หรือ 12V ตัวอย่างเช่น หากคุณใช้แบตเตอรี่ 3V มอเตอร์จะหมุนด้วยความเร็วที่กำหนด หากคุณเปลี่ยนเป็นแบตเตอรี่ 6V รอบต่อนาทีจะเพิ่มขึ้น สิ่งนี้เกิดขึ้นเนื่องจากแรงดันไฟฟ้าที่มากขึ้นจะดันกระแสไฟฟ้าผ่านมอเตอร์มากขึ้น ทำให้หมุนเร็วขึ้น
เคล็ดลับ: ตรวจสอบแรงดันไฟฟ้าที่แนะนำสำหรับมอเตอร์ของคุณเสมอ แรงดันไฟฟ้าที่มากเกินไปอาจสร้างความเสียหายได้ ในขณะที่แรงดันไฟฟ้าที่น้อยเกินไปอาจให้ความเร็วไม่เพียงพอ
โหลดเอฟเฟกต์
โหลดคือทุกสิ่งที่มอเตอร์ต้องเคลื่อนที่ เช่น ใบพัดหรือเกียร์ เมื่อคุณเพิ่มโหลด รอบต่อนาทีจะลดลง มอเตอร์ทำงานหนักขึ้นเพื่อเปลี่ยนน้ำหนักส่วนเกิน หากเพิ่มภาระหนัก ความเร็วจะลดลงมากยิ่งขึ้น ตัวอย่างเช่น มอเตอร์ไมโครไร้แกนที่หมุนอย่างอิสระอาจมีความเร็วถึง 33,000 รอบต่อนาที หากคุณติดพัดลมขนาดเล็ก ความเร็วอาจลดลงเหลือ 28,000 รอบต่อนาที พัดลมที่ใหญ่กว่าก็จะช้าลงไปอีก
คุณควรคำนึงถึงภาระเสมอเมื่อเลือกมอเตอร์สำหรับโครงการของคุณ
การออกแบบมอเตอร์
การออกแบบมอเตอร์ยังส่งผลต่อรอบต่อนาทีด้วย มอเตอร์ไร้แกนขนาดเล็กใช้ขดลวดน้ำหนักเบาและไม่มีแกน การออกแบบนี้มีคุณสมบัติพิเศษบางประการ:
อัตราเร่งที่รวดเร็วและประสิทธิภาพสูงเนื่องจากโครงสร้างน้ำหนักเบา
ความเฉื่อยต่ำ ซึ่งหมายความว่ามอเตอร์ตอบสนองอย่างรวดเร็วต่อการเปลี่ยนแปลงความเร็ว
การทำงานราบรื่นและมั่นคงด้วยแรงบิดฟันเฟืองที่ลดลง
กำลังขับสูงในขนาดที่เล็กซึ่งช่วยในพื้นที่แคบ
มอเตอร์ที่มีแม่เหล็กแรงสูง ชนิดขดลวดพิเศษ และโรเตอร์ขนาดเล็กสามารถหมุนได้เร็วขึ้น การออกแบบที่ไร้แกนยังช่วยลดเสียงรบกวนและเส้นโค้งความเร็วที่นุ่มนวลยิ่งขึ้น คุณจะเห็นคุณประโยชน์เหล่านี้ในอุปกรณ์ต่างๆ เช่น โดรน เครื่องมือทางการแพทย์ และหุ่นยนต์ ซึ่งความเร็วและการควบคุมมีความสำคัญที่สุด
การวัดรอบต่อนาที
การใช้เครื่องวัดวามเร็ว
เครื่องวัดวามเร็วช่วยให้คุณทราบว่ามอเตอร์หมุนเร็วแค่ไหน เครื่องมือนี้แสดงความเร็วทันทีและแม่นยำมาก มาตรวัดรอบแบบดิจิตอลบางรุ่นใช้เลเซอร์เพื่อตรวจสอบการเคลื่อนไหว คุณชี้เลเซอร์ไปที่จุดมันวาวบนมอเตอร์ จากนั้นหน้าจอจะแสดงหมายเลขรอบต่อนาที เครื่องวัดวามเร็วเหล่านี้สามารถวัดความเร็วได้ตั้งแต่ 10 ถึง 99,999 รอบต่อนาที ทำงานได้ตั้งแต่ประมาณ 50 มม. ถึง 200 มม. คุณไม่จำเป็นต้องสัมผัสมอเตอร์ จึงไม่มีการลากพิเศษ
คุณสมบัติ |
คำอธิบาย |
พิมพ์ |
เครื่องวัดวามเร็วแบบดิจิตอลแบบไม่สัมผัส |
ช่วงการวัดรอบต่อนาที |
10.0 ถึง 99,999 รอบต่อนาที |
วิธีการวัด |
ไม่เป็นการรบกวนโดยใช้เลเซอร์ |
แสดง |
LCD Backlight แสดง RPM และจำนวนการปฏิวัติ |
ระยะทางเป้าหมาย |
50 มม. ถึง 200 มม |
อายุการใช้งานแบตเตอรี่ |
ใช้งานต่อเนื่องได้ 12 ชม |
หากคุณต้องการผลลัพธ์ที่แม่นยำยิ่งขึ้น คุณสามารถใช้เครื่องกำเนิดไฟฟ้ากระแสตรงมาตรวัดรอบได้ เครื่องมือนี้จะเปลี่ยนความเร็วในการหมุนเป็นสัญญาณแรงดันไฟฟ้า เหมาะสำหรับห้องปฏิบัติการและระบบเซอร์โว
วิธีการทำเอง
คุณสามารถตรวจสอบรอบต่อนาทีที่บ้านหรือในชั้นเรียนได้หลายวิธี คุณอาจใช้เซ็นเซอร์ออปติคัลเพื่อระบุเครื่องหมายบนเพลาที่กำลังหมุน คุณสามารถสร้างตัวนับ RPM พร้อมตัวนับและตัวเลข LED แอปโทรศัพท์บางแอปใช้กล้องเพื่อคำนวณรอบต่อนาที
เคล็ดลับ: เซ็นเซอร์ออปติคัลและแอปโทรศัพท์ใช้งานได้รวดเร็วและง่ายดาย คุณไม่จำเป็นต้องใช้เครื่องมือพิเศษ และการตั้งค่าก็ทำได้ง่าย
คุณยังสามารถใช้เซนเซอร์จับความใกล้เคียงหรือตรวจสอบ EMF ด้านหลังเพื่อดูวิธีวัดความเร็วที่ประหยัด การนับด้วยนาฬิกาที่เร็วจะช่วยให้คุณได้ผลลัพธ์ที่ดี แม้จะวิ่งด้วยความเร็วต่ำก็ตาม
คำนวณจาก Spec
คุณสามารถเดารอบต่อนาทีได้โดยใช้พิกัด Kv และแรงดันไฟฟ้าที่คุณใช้ อัตรา Kv จะบอกคุณว่ามอเตอร์หมุนกี่ครั้งในแต่ละโวลต์ สูตรง่ายๆ คือ
RPM = Kv × แรงดันไฟฟ้า
ตัวอย่างเช่น ถ้ามอเตอร์ของคุณมีค่า Kv 1,000 และคุณใช้ไฟ 10 โวลต์ รอบต่อนาทีจะเท่ากับ 10,000 หากคุณมีมอเตอร์ 2300Kv และแบตเตอรี่ 14.8V รอบต่อนาทีจะอยู่ที่ประมาณ 34,040 ดูข้อมูลของผู้ผลิตเสมอเพื่อหาคำตอบที่ดีที่สุด ด้วยวิธีนี้ คุณจะทราบความเร็วได้ก่อนที่จะเปิดไมโครคอร์เลสมอเตอร์
ทำไม RPM ถึงมีความสำคัญ
ผลงาน
RPM มีความสำคัญต่อการทำงานของมอเตอร์ หากคุณใช้มอเตอร์ไมโครคอร์เลส คุณต้องการให้มอเตอร์เคลื่อนที่เร็วและราบรื่น รอบต่อนาทีที่สูงขึ้นจะทำให้มอเตอร์ตอบสนองได้อย่างรวดเร็ว เหมาะสำหรับสิ่งที่ต้องการความเร็วและความแม่นยำ เช่น หุ่นยนต์หรืออุปกรณ์ขนาดเล็ก ตารางด้านล่างแสดงให้เห็นว่า rpm เปลี่ยนแปลงประสิทธิภาพอย่างไร:
ข้อมูลจำเพาะ |
ค่า |
แรงดันไฟฟ้าที่ได้รับการจัดอันดับ |
3.0V |
ความเร็วสูงสุด |
14,000 ± 2,500 รอบต่อนาที |
ขนาด |
11.9มม. x 4.6มม. x 4.9มม |
ความเหมาะสมของการใช้งาน |
หุ่นยนต์และอุปกรณ์อิเล็กทรอนิกส์ขนาดจิ๋ว |
ผลกระทบต่อประสิทธิภาพ |
RPM ที่สูงขึ้นนำไปสู่การสั่งงานและการตอบสนองที่รวดเร็วยิ่งขึ้น ซึ่งเป็นสิ่งสำคัญสำหรับความแม่นยำและการเคลื่อนไหวที่รวดเร็ว |
คุณได้รับมากกว่าความเร็วด้วยมอเตอร์เหล่านี้ มอเตอร์ไมโครคอร์เลสสตาร์ทและหยุดอย่างรวดเร็ว ให้พลังอันแข็งแกร่งในขนาดที่เล็ก มันทำงานได้อย่างราบรื่น ดังนั้นคุณจึงควบคุมมันได้อย่างง่ายดาย มอเตอร์เหล่านี้ยังรับมือกับความร้อนได้ดีซึ่งช่วยให้มีอายุการใช้งานยาวนานขึ้น
คุณสมบัติ |
คำอธิบาย |
ความเร็วในการหมุน |
ขึ้นกับพัลส์อินพุตที่มากขึ้น ความเร็วที่ช้าอาจทำให้เกิดปัญหาได้ |
โหลดแรงบิดกระแทก |
ภาระหนักจะทำให้มอเตอร์หมุนช้าลง |
การประยุกต์ใช้แรงดันไฟฟ้า |
แรงดันไฟฟ้าที่มากขึ้นทำให้มอเตอร์หมุนเร็วขึ้น |
หมายเหตุ: รอบต่อนาทีสูงอาจหมายถึงแรงบิดน้อยลงและใช้พลังงานมากขึ้น คุณต้องรักษาสมดุลระหว่างความเร็วกับความแข็งแกร่งและประสิทธิภาพ
ปัจจัยด้านประสิทธิภาพ |
คำอธิบาย |
รอบต่อนาทีสูง |
มอเตอร์ไร้คอร์สามารถวิ่งได้เร็วมาก แต่ต้องใช้อย่างระมัดระวังเพื่อหลีกเลี่ยงความเสียหาย |
แรงบิด |
หากรอบต่อนาทีสูงขึ้น แรงบิดก็จะลดลง |
การใช้พลังงาน |
ความเร็วที่เร็วกว่าจะใช้พลังงานมากกว่า ซึ่งอาจลดประสิทธิภาพลงได้ |
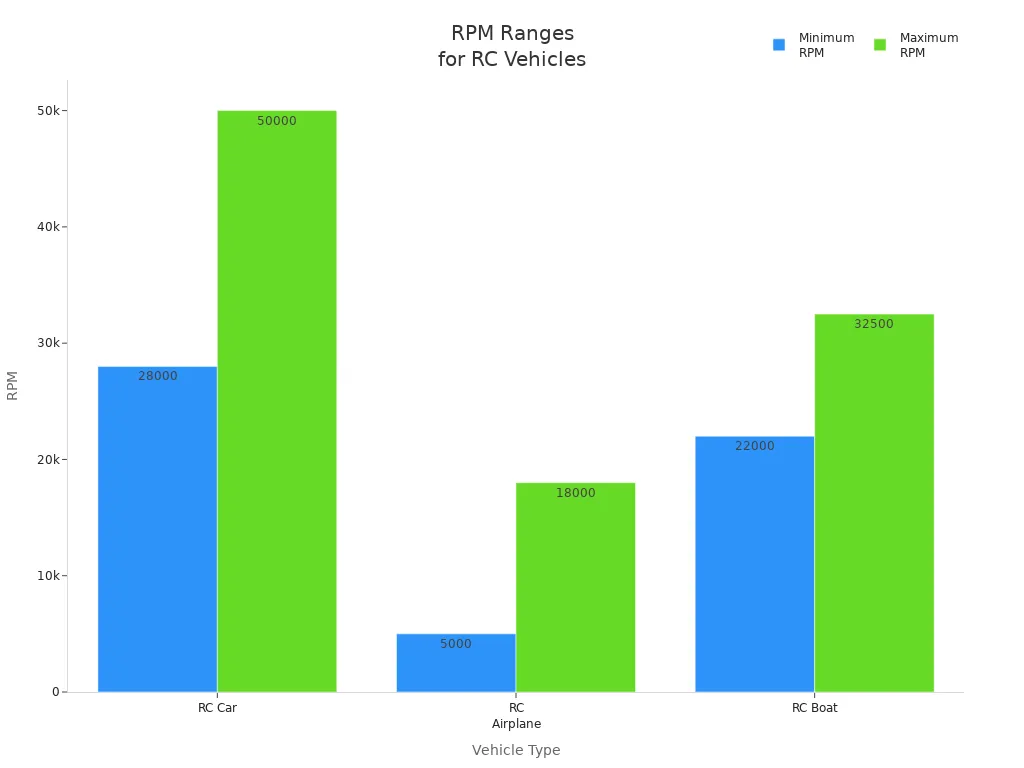
แอปพลิเคชันพอดี
คุณต้องเลือกรอบต่อนาทีที่เหมาะสมสำหรับโปรเจ็กต์ของคุณ อุปกรณ์ที่ต่างกันต้องการความเร็วที่แตกต่างกัน โดรนต้องใช้รอบต่อนาทีสูงเพื่อหมุนอย่างรวดเร็วและลอยขึ้น อุปกรณ์ทางการแพทย์ต้องการมอเตอร์ที่เงียบและมั่นคง ของเล่นจำเป็นต้องมีมอเตอร์ที่ปลอดภัยและไม่เร็วเกินไป ตารางด้านล่างแสดงให้เห็นว่า rpm เหมาะกับการใช้งานแต่ละครั้งอย่างไร:
แอปพลิเคชัน |
ช่วงรอบต่อนาที |
คุณสมบัติที่สำคัญ |
โดรน |
สูงสุด 30,000 |
อัตราส่วนกำลังต่อน้ำหนักสูง น้ำหนักเบา ประสิทธิภาพสูงสำหรับการบินที่ยาวนาน |
อุปกรณ์การแพทย์ |
แตกต่างกันไป |
เสียงรบกวนต่ำ การควบคุมที่แม่นยำ ความน่าเชื่อถือสำหรับงานที่สำคัญ |
ของเล่น |
สูงสุด 33,000 |
ขนาดกะทัดรัด การทำงานที่มีประสิทธิภาพสำหรับรีโมทคอนโทรลและรุ่นต่างๆ |
โดรน: รอบต่อนาทีสูงช่วยให้พวกมันยกและเคลื่อนที่ได้เร็ว
อุปกรณ์ทางการแพทย์: รอบต่อนาทีที่ต่ำกว่าช่วยให้อุปกรณ์เงียบและมั่นคง
ของเล่น: รอบต่อนาทีปานกลางทำให้สนุกและปลอดภัย
ตรวจสอบเสมอว่าโปรเจ็กต์ของคุณต้องการรอบต่อนาทีเท่าใด การเลือกความเร็วที่เหมาะสมช่วยให้อุปกรณ์ของคุณทำงานได้ดีและใช้งานได้นานขึ้น
คุณได้เรียนรู้ว่ามอเตอร์ไมโครไร้คอร์หมุนตั้งแต่ 20,000 ถึง 66,000 รอบต่อนาที ความเร็วขึ้นอยู่กับแรงดันไฟฟ้า โหลด และวิธีการสร้างมอเตอร์ ดูที่เอกสารข้อมูลเสมอเพื่อหาอัตรารอบต่อนาที คุณควรวัดความเร็วสำหรับโปรเจ็กต์ของคุณด้วย ตารางด้านล่างแสดงประเด็นหลัก:
ประเด็นสำคัญ |
รายละเอียด |
ช่วงรอบต่อนาที |
โดยทั่วไป 20,000–66,000 รอบต่อนาที |
ปัจจัยที่มีอิทธิพล |
แรงดันไฟฟ้า โหลด การออกแบบมอเตอร์ |
การวัด |
เครื่องวัดวามเร็ว DIY หรือการคำนวณ |
แอปพลิเคชันพอดี |
โดรน การแพทย์ หุ่นยนต์ ของเล่น |
ตรวจสอบให้แน่ใจว่ารอบต่อนาทีตรงกับสิ่งที่โปรเจ็กต์ของคุณต้องการ การเลือก kv ที่ถูกต้องและการตรวจสอบข้อมูลจำเพาะสามารถหยุดปัญหาเกี่ยวกับมอเตอร์ได้
คำถามที่พบบ่อย
'coreless' หมายความว่าอย่างไรในไมโครมอเตอร์
มอเตอร์ไร้แกนใช้ขดลวดที่ไม่มีแกนเหล็ก คุณจะได้รับการตอบสนองเร็วขึ้นและมีน้ำหนักน้อยลง การออกแบบนี้ช่วยให้มอเตอร์หมุนได้อย่างรวดเร็วและราบรื่น
คุณสามารถควบคุมรอบต่อนาทีของมอเตอร์ไมโครคอร์เลสได้หรือไม่
ได้ คุณสามารถควบคุมรอบต่อนาทีได้โดยการเปลี่ยนแรงดันไฟฟ้าหรือใช้ตัวควบคุมมอเตอร์ แรงดันไฟฟ้าต่ำจะทำให้มอเตอร์ช้าลง แรงดันไฟฟ้าที่สูงขึ้นทำให้หมุนเร็วขึ้น
ทำไม rpm ถึงลดลงเมื่อคุณเพิ่มโหลด?
เมื่อคุณเพิ่มภาระ มอเตอร์จะทำงานหนักขึ้น ความเร็วลดลงเนื่องจากมอเตอร์ต้องการกำลังมากขึ้นเพื่อเปลี่ยนน้ำหนักส่วนเกิน คุณจะเห็นรอบต่อนาทีที่ต่ำกว่าพร้อมกับสัมภาระที่หนักกว่า
คุณจะรู้ได้อย่างไรว่ามอเตอร์ของคุณหมุนเร็วเกินไป?
คุณอาจสังเกตเห็นความร้อน เสียง หรือแรงสั่นสะเทือนเพิ่มขึ้น มอเตอร์อาจมีอายุการใช้งานไม่นาน ตรวจสอบขีดจำกัดรอบต่อนาทีของผู้ผลิตเสมอเพื่อให้มอเตอร์ของคุณปลอดภัย
จะเกิดอะไรขึ้นถ้าคุณใช้แรงดันไฟฟ้ามากเกินไป?
แรงดันไฟฟ้าที่มากเกินไปอาจทำให้มอเตอร์ร้อนเกินไป คุณอาจสร้างความเสียหายให้กับขดลวดหรือทำให้อายุการใช้งานของมอเตอร์สั้นลง ใช้แรงดันไฟฟ้าที่แนะนำเสมอเพื่อการทำงานที่ปลอดภัย