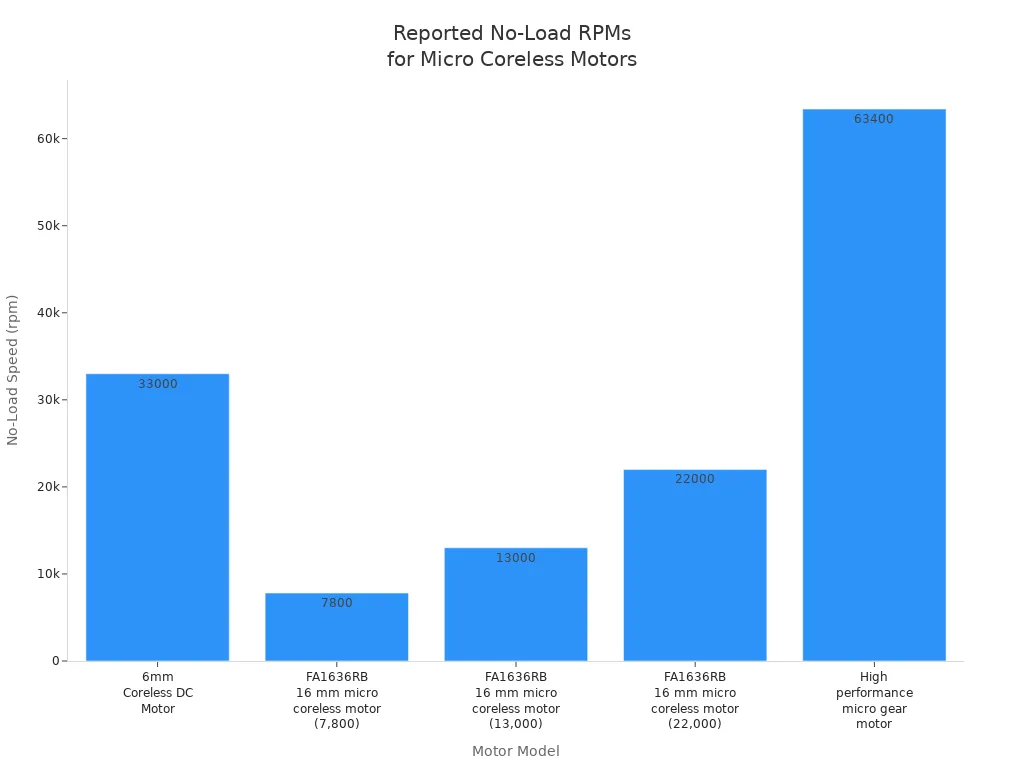
အဲဒါကို တွေ့ရတတ်တယ်။ micro coreless motor သည် 3 မှ 4 ဗို့ဖြင့် ပါဝါဖြင့် လည်ပတ်သောအခါတွင် 20,000 မှ 66,000 rpm ခန့်အမြန်နှုန်းဖြင့် လည်ပတ်သည်။ Rpm သည် တစ်မိနစ်လျှင် လှည့်ပတ်မှုများကို ကိုယ်စားပြုပြီး မော်တာ၏ရိုးတံကို မည်မျှမြန်ကြောင်း ပြောပြသည်။ ဤအမြန်နှုန်းသည် သင့်စက်၏ စွမ်းအားမည်မျှထုတ်လွှတ်နိုင်သည်ကို သက်ရောက်မှုရှိသောကြောင့် အရေးကြီးပါသည်။ ဥပမာအားဖြင့်၊ အောက်ဖော်ပြပါဇယားသည် မတူညီသောမော်ဒယ်များအတွက် လက်တွေ့ကမ္ဘာ rpm နံပါတ်များကို ပြသထားသည်။
မော်ဒယ် |
ဝန်မတင်အမြန်နှုန်း (rpm) |
6mm Coreless DC မော်တာ |
33,000 ± 10% |
FA1636RB 16 mm micro coreless မော်တာ |
7,800, 13,000, 22,000, 22,000 |
စွမ်းဆောင်ရည်မြင့် မိုက်ခရိုဂီယာမော်တာ |
၆၃,၄၀၀ |
သော့သွားယူမှုများ
Micro Coreless မော်တာများသည် များသောအားဖြင့် 20,000 မှ 66,000 rpm အထိ လည်ပတ်လေ့ရှိသည်။ အလုပ်လုပ်ရန် 3 မှ 4 ဗို့လိုအပ်သည်။ သင့်မော်တာ၏ အတိအကျအမြန်နှုန်းကို သိရှိရန် သတ်မှတ်ချက်များကို ကြည့်ပါ။
No-load rpm သည် loaded rpm ထက် ပိုများသည်။ အလေးချိန် သို့မဟုတ် ခံနိုင်ရည်ကို ထည့်ပါက မော်တာသည် နှေးကွေးသွားပါသည်။ သင့်ပရောဂျက်အတွက် မော်တာရွေးသည့်အခါ ဝန်ကို အမြဲစဉ်းစားပါ။
မော်တာအား ဗို့အားပိုပေးခြင်းဖြင့် လှည့်ပတ်မှုကို ပိုမြန်စေသည်။ မော်တာမကွဲစေရန် မှန်ကန်သောဗို့အားကို အသုံးပြုပါ။ ၎င်းသည် သင်အလိုရှိသော အမြန်နှုန်းကို ရရှိရန် ကူညီပေးသည်။
မော်တာ၏ rpm ကိုအတိအကျစစ်ဆေးရန် tachometer ကိုအသုံးပြုပါ။ အမြန်နှုန်းကို စစ်ဆေးရန် အလင်းအာရုံခံကိရိယာများ သို့မဟုတ် အက်ပ်များကဲ့သို့သော DIY နည်းလမ်းများကိုလည်း အသုံးပြုနိုင်သည်။
သင့်စက်အတွက် မှန်ကန်သော rpm ကိုရွေးချယ်ခြင်းသည် အလွန်အရေးကြီးပါသည်။ ဒရုန်းများ သို့မဟုတ် ဆေးဘက်ဆိုင်ရာ ကိရိယာများကဲ့သို့ မတူညီသောအရာများသည် အကောင်းဆုံးလုပ်ဆောင်ရန် အချို့သောအမြန်နှုန်းများ လိုအပ်သည်။
Micro Coreless Motor RPM အကွာအဝေး
ပုံမှန် RPM တန်ဖိုးများ
သင်ကြည့်ရှုသောအခါတွင်ကျယ်ပြန့်သော rpm တန်ဖိုးများကိုသင်တွေ့နိုင်သည်။ micro coreless မော်တာများ ။ မော်ဒယ်အများစုသည် 3 မှ 4 ဗို့ဖြင့် ပါဝါဖြင့် လည်ပတ်သောအခါတွင် 20,000 မှ 66,000 rpm ကြားရှိသည်။ RC ဒရုန်းများ သို့မဟုတ် မြန်နှုန်းမြင့် အပလီကေးရှင်းများအတွက် ဒီဇိုင်းထုတ်ထားသော အချို့သော မော်တာများသည် ပိုမိုမြင့်မားသော အမြန်နှုန်းများအထိ ရောက်ရှိနိုင်သည်။ ဤသည်မှာ ဥပမာအချို့ဖြစ်သည်။
RC ဒရုန်းများတွင် အသုံးပြုသည့် micro coreless motor သည် 566mA ဆက်တိုက် 24 ဗို့ဖြင့် 10,230 rpm အထိ ရောက်ရှိနိုင်သည်။
ပုံမှန် micro coreless မော်တာများစွာသည် ဝန်မရှိသောအခြေအနေအောက်တွင် 33,000 rpm သို့မဟုတ် ထို့ထက်ပို၍လည်ပတ်သည်။
စွမ်းဆောင်ရည်မြင့်မော်ဒယ်များသည် 50,000 rpm ထက် အမြန်နှုန်းကို ရရှိနိုင်သည်။
သင့်မော်တာအတွက် သတ်မှတ်ချက်များကို အမြဲစစ်ဆေးသင့်သည်။ ထုတ်လုပ်သူများက ခံနိုင်ရည်မရှိဘဲ မော်တာသည် မည်မျှမြန်ကြောင်းပြသသည့် ဝန်မတင်အမြန်နှုန်းကို စာရင်းပြုစုထားသည်။
No-Load နှင့် Loaded RPM
သင်သည် micro coreless motor ကိုအသုံးပြုသောအခါ၊ no-load rpm နှင့် loaded rpm အကြားခြားနားချက်ကိုသင်သတိပြုမိလိမ့်မည်။ No-load rpm ဆိုသည်မှာ မော်တာအား နှေးကွေးစေခြင်းမရှိဘဲ လွတ်လပ်စွာ လည်ပတ်နေခြင်းကို ဆိုလိုသည်။ Loaded rpm သည် ပန်ကာ၊ ဂီယာ သို့မဟုတ် ခံနိုင်ရည်ကိုဖန်တီးပေးသည့် အခြားကိရိယာတစ်ခုကို ချိတ်လိုက်သောအခါတွင် ဖြစ်ပေါ်သည်။
မော်တာသည် ခံနိုင်ရည်အား ကျော်လွှားရန် ပိုမိုခက်ခဲသောကြောင့် ဝန်ကိုထည့်သောအခါ rpm ကျဆင်းသွားသည်။ နောက်ကျော EMF (လျှပ်စစ်ဓာတ်အား) လျော့နည်းသွားပြီး အမြန်နှုန်းကို လျှော့ချပေးသည်။ ဝန်နှင့် လက်ရှိနှင့် torque ဟန်ချက်ညီသည်အထိ မော်တာသည် နှေးကွေးသွားသည်။
ဤသည်မှာ သင်မျှော်လင့်နိုင်သည်-
No-load rpm သည် loaded rpm ထက် အမြဲမြင့်မားသည်။
ဝန်ကိုတိုးလာသည်နှင့်အမျှ အရှိန်ကျဆင်းသွားသည်။
အတိအကျ ကျဆင်းမှုသည် ဝန်အရွယ်အစားနှင့် မော်တာ၏ ဒီဇိုင်းပေါ်တွင် မူတည်သည်။
သင့်စက်ကို သတ်မှတ်ထားသော အမြန်နှုန်းဖြင့် လည်ပတ်စေလိုပါက၊ no-load နှင့် loaded rpm နှစ်ခုလုံးကို ထည့်သွင်းစဉ်းစားရန် လိုအပ်ပါသည်။ ၎င်းသည် သင့်ပရောဂျက်အတွက် မှန်ကန်သော micro coreless မော်တာကို ရွေးချယ်ရန် ကူညီပေးသည်။
RPM ကို ထိခိုက်စေသည့်အချက်များ
ဗို့အားသက်ရောက်မှု
micro coreless မော်တာသို့ သင်ထောက်ပံ့ပေးသည့် ဗို့အားသည် ၎င်း၏အမြန်နှုန်းအပေါ် ကြီးမားသောအကျိုးသက်ရောက်မှုရှိသည်။ ဗို့အားကို မြှင့်လိုက်သောအခါ rpm တက်လာသည်။ ဗို့အားကို လျှော့ထားလျှင် မော်တာသည် နှေးကွေးသွားသည်။ Mini DC မော်တာအများစုသည် 1.5 နှင့် 100 ဗို့ကြားတွင် အကောင်းဆုံးအလုပ်လုပ်သည်။ ဘုံရွေးချယ်မှုများမှာ 3V၊ 6V သို့မဟုတ် 12V ဖြစ်သည်။ ဥပမာအားဖြင့်၊ သင်သည် 3V ဘက်ထရီကိုအသုံးပြုပါက၊ မော်တာသည် သတ်မှတ်ထားသောအမြန်နှုန်းဖြင့် လည်ပတ်နေမည်ဖြစ်သည်။ 6V ဘက်ထရီသို့ပြောင်းပါက rpm တက်လာပါမည်။ မော်တာမှတဆင့် လျှပ်စီးကြောင်းများ ပိုမိုတွန်းပို့သောကြောင့် ၎င်းသည် ပိုမိုမြန်ဆန်စွာလှည့်နိုင်သောကြောင့်ဖြစ်သည်။
အကြံပြုချက်- သင့်မော်တာအတွက် အကြံပြုထားသော ဗို့အားကို အမြဲစစ်ဆေးပါ။ ဗို့အားများလွန်းပါက ၎င်းကို ပျက်စီးစေနိုင်သော်လည်း အနည်းငယ်သာ အရှိန်မလုံလောက်နိုင်ပါ။
Effects များကို တင်ပါ။
ဝန်သည် ပန်ကာ သို့မဟုတ် ဂီယာကဲ့သို့ မော်တာတွင် ရွေ့လျားရမည့်အရာဖြစ်သည်။ load တစ်ခုထည့်သောအခါ rpm ကျသွားပါသည်။ အပိုအလေးချိန်ကိုလှည့်ရန် မော်တာသည် ပိုမိုခက်ခဲသည်။ လေးလံသောဝန်ကိုထည့်ပါက အရှိန်ပိုကျသွားသည်။ ဥပမာအားဖြင့်၊ လွတ်လပ်စွာလည်ပတ်နေသော micro coreless motor သည် 33,000 rpm သို့ရောက်ရှိနိုင်သည်။ ပန်ကာအသေးတစ်လုံးကို တပ်ဆင်ပါက အမြန်နှုန်းသည် 28,000 rpm အထိ ကျဆင်းသွားနိုင်သည်။ ပိုကြီးတဲ့ ပန်ကာက ဒီထက်ပိုပြီး နှေးသွားလိမ့်မယ်။
သင့်ပရောဂျက်အတွက် မော်တာရွေးတဲ့အခါ ဝန်ကို အမြဲစဉ်းစားသင့်ပါတယ်။
မော်တော်ဒီဇိုင်း
မော်တာ၏ ဒီဇိုင်းသည် ၎င်း၏ rpm ကိုလည်း သက်ရောက်မှုရှိသည်။ micro coreless motor သည် ပေါ့ပါးပြီး coreless coil ကို အသုံးပြုသည်။ ဤဒီဇိုင်းသည် အထူးအင်္ဂါရပ်အချို့ကို ပေးသည်-
ပေါ့ပါးသောတည်ဆောက်မှုကြောင့် လျင်မြန်သောအရှိန်နှင့် စွမ်းဆောင်ရည်မြင့်မားသည်။
နိမ့်သော inertia ဆိုသည်မှာ မော်တာသည် အမြန်နှုန်းပြောင်းလဲမှုများကို လျင်မြန်စွာ တုံ့ပြန်သည်။
ချောမွတ်ပြီး တည်ငြိမ်သော လည်ပတ်အား လျော့ချပေးသောကြောင့် ကော့တက်ဂီယာ ရုန်းအား
သေးငယ်သောအရွယ်အစားတွင် ပါဝါအထွက်နှုန်းမြင့်မားပြီး ကျဉ်းကျပ်သောနေရာများတွင် ကူညီပေးသည်။
သံလိုက်အားကောင်းသော မော်တာများ၊ အထူးအကွေ့အကောက်အမျိုးအစားများနှင့် ရဟတ်ငယ်များသည် ပိုမိုမြန်ဆန်စွာ လည်ပတ်နိုင်သည်။ coreless ဒီဇိုင်းသည် ဆူညံသံနည်းပြီး ချောမွေ့သော အမြန်နှုန်းမျဉ်းကိုလည်း ဆိုလိုသည်။ ဒရုန်းများ၊ ဆေးဘက်ဆိုင်ရာကိရိယာများနှင့် စက်ရုပ်များကဲ့သို့ ကိရိယာများတွင် အဆိုပါအကျိုးကျေးဇူးများကို သင်တွေ့မြင်ရမည်ဖြစ်ပြီး၊ မြန်နှုန်းနှင့် ထိန်းချုပ်မှုမှာ အရေးအကြီးဆုံးဖြစ်သည်။
RPM တိုင်းတာခြင်း။
Tachometer အသုံးပြုခြင်း။
တာတိုမီတာ သည် မော်တာ မည်မျှ လျင်မြန်စွာ ဝင်သွားသည်ကို သိရှိရန် ကူညီပေးသည်။ ဤကိရိယာသည် အမြန်နှုန်းကို ချက်ချင်းပြသပြီး အလွန်တိကျသည်။ အချို့သော ဒစ်ဂျစ်တယ်တာတိုမီတာများသည် လှုပ်ရှားမှုကိုစစ်ဆေးရန် လေဆာကိုအသုံးပြုသည်။ မော်တာပေါ်ရှိ တောက်ပသောနေရာတွင် လေဆာကို သင်ညွှန်ပြသည်။ ထို့နောက် မျက်နှာပြင်သည် rpm နံပါတ်ကို ပြသသည်။ ဤ tachometers များသည် အမြန်နှုန်း 10 မှ 99,999 rpm အထိ တိုင်းတာနိုင်သည်။ ၎င်းတို့သည် 50 မီလီမီတာမှ 200 မီလီမီတာအကွာတွင်အလုပ်လုပ်သည်။ မော်တာအားထိရန် မလိုပါ၊ ထို့ကြောင့် အပိုဆွဲခြင်း မရှိပါ။
ထူးခြားချက် |
ဖော်ပြချက် |
ရိုက်ပါ။ |
အဆက်အသွယ်မရှိသော ဒစ်ဂျစ်တယ်တာချာမီတာ |
RPM အတိုင်းအတာ အတိုင်းအတာ |
10.0 မှ 99,999 RPM |
တိုင်းတာခြင်းနည်းလမ်း |
အနှောက်အယှက်မရှိသော လေဆာကိုအသုံးပြုပါ။ |
ပြသခြင်း။ |
LCD Backlight၊ RPM နှင့် revolution count ကိုပြသသည်။ |
ပစ်မှတ်အကွာအဝေး |
50 မီလီမီတာမှ 200 မီလီမီတာ |
ဘက်ထရီသက်တမ်း |
12 နာရီအဆက်မပြတ်လည်ပတ် |
ပိုမိုတိကျသောရလဒ်များလိုအပ်ပါက DC tachometer generator ကိုသုံးနိုင်သည်။ ဤကိရိယာသည် လှည့်ခြင်းအမြန်နှုန်းကို ဗို့အားအချက်ပြမှုအဖြစ် ပြောင်းလဲပေးသည်။ ဓာတ်ခွဲခန်းများနှင့် ဆာဗာစနစ်များအတွက် ကောင်းမွန်သည်။
DIY နည်းလမ်းများ
အိမ်တွင် သို့မဟုတ် အတန်းထဲတွင် rpm ကို နည်းလမ်းများစွာဖြင့် စစ်ဆေးနိုင်သည်။ spinning shaft တွင် အမှတ်အသားများကို သင်ထောက်လှမ်းရန် optical sensor ကိုသုံးနိုင်သည်။ ကောင်တာများနှင့် LED နံပါတ်များဖြင့် RPM ကောင်တာတစ်ခုကို သင်တည်ဆောက်နိုင်သည်။ အချို့သော ဖုန်းအက်ပ်များသည် rpm ကို သိရှိရန် သင့်ကင်မရာကို အသုံးပြုသည်။
အကြံပြုချက်- အလင်းအာရုံခံကိရိယာများနှင့် ဖုန်းအက်ပ်များသည် မြန်ဆန်ပြီး အသုံးပြုရလွယ်ကူသည်။ အထူးကိရိယာများ မလိုအပ်ပါ၊ စနစ်ထည့်သွင်းခြင်းသည် ရိုးရှင်းပါသည်။
အမြန်နှုန်းတိုင်းခြင်းအတွက် စျေးပေါသောနည်းလမ်းအတွက် proximity sensor ကိုသုံးနိုင်သည် သို့မဟုတ် နောက်ကျော EMF ကိုစစ်ဆေးနိုင်သည်။ မြန်သောနာရီဖြင့် ရေတွက်ခြင်းသည် နှေးသောအမြန်နှုန်းများတွင်ပင် ရလဒ်ကောင်းများရရှိရန် ကူညီပေးသည်။
Specs များမှ တွက်ချက်ခြင်း။
Kv အဆင့်သတ်မှတ်ချက်နှင့် သင်အသုံးပြုသည့်ဗို့အားကို အသုံးပြု၍ rpm ကို ခန့်မှန်းနိုင်သည်။ Kv အဆင့်သတ်မှတ်ချက်သည် ဗို့အားတစ်ခုစီအတွက် မော်တာလည်ပတ်သည့်အကြိမ်အရေအတွက်ကို ပြောပြသည်။ ဤတွင် ရိုးရိုးဖော်မြူလာဖြစ်ပါသည်-
RPM = Kv × ဗို့အား
ဥပမာအားဖြင့်၊ သင့်မော်တာတွင် 1000 Kv ရှိပြီး 10 ဗို့ကိုအသုံးပြုပါက rpm သည် 10,000 ဖြစ်သည်။ သင့်တွင် 2300Kv မော်တာနှင့် 14.8V ဘက်ထရီရှိပါက၊ rpm သည် 34,040 ခန့်ဖြစ်သည်။ အကောင်းဆုံးအဖြေအတွက် ထုတ်လုပ်သူ၏ဒေတာကို အမြဲကြည့်ရှုပါ။ ဤနည်းဖြင့် သင်သည် သင်၏ micro coreless motor ကိုမဖွင့်မီ မြန်နှုန်းကို သိနိုင်သည်။
အဘယ်ကြောင့် RPM အရေးကြီးသနည်း။
စွမ်းဆောင်ရည်
RPM သည် သင့်မော်တာ အလုပ်လုပ်ပုံအတွက် အရေးကြီးပါသည်။ အကယ်၍ သင်သည် micro coreless motor ကိုအသုံးပြုပါက၊ ၎င်းကို လျင်မြန်ချောမွေ့စွာ ရွေ့လျားစေလိုပါသည်။ မြင့်မားသော rpm သည် မော်တာအား လျင်မြန်စွာ တုံ့ပြန်နိုင်သည်။ စက်ရုပ်များ သို့မဟုတ် သေးငယ်သည့် ဂက်ဂျက်များကဲ့သို့ မြန်နှုန်းနှင့် တိကျမှု လိုအပ်သည့်အရာများအတွက် ၎င်းသည် ကောင်းမွန်သည်။ အောက်ဖော်ပြပါဇယားတွင် rpm သည် စွမ်းဆောင်ရည်ကို မည်သို့ပြောင်းလဲသည်ကို ပြသသည်-
သတ်မှတ်ချက် |
တန်ဖိုး |
အဆင့်သတ်မှတ်ဗို့အား |
3.0V |
အဆင့်သတ်မှတ်ထားသော မြန်နှုန်း |
14,000 ± 2,500 rpm |
အတိုင်းအတာများ |
11.9mm x 4.6mm x 4.9mm |
လျှောက်လွှာ သင့်လျော်မှု |
စက်ရုပ်များနှင့် အသေးစား အီလက်ထရွန်နစ်ပစ္စည်းများ |
စွမ်းဆောင်ရည်အပေါ်သက်ရောက်မှု |
မြင့်မားသော RPM သည် တိကျမှုနှင့် လျင်မြန်သော လှုပ်ရှားမှုအတွက် အရေးကြီးသော လုပ်ဆောင်ချက်နှင့် တုံ့ပြန်မှုကို ပိုမိုမြန်ဆန်စေသည်။ |
သင်သည် ဤမော်တာများဖြင့် မြန်နှုန်းထက် ပိုရနိုင်သည်။ Micro Coreless မော်တာများသည် စတင်ပြီး လျင်မြန်စွာ ရပ်တန့်သည်။ ၎င်းတို့သည် သေးငယ်သော အရွယ်အစားဖြင့် ခွန်အားကို ပေးသည်။ ၎င်းတို့သည် ချောမွေ့စွာ လည်ပတ်နိုင်သောကြောင့် ၎င်းတို့ကို အလွယ်တကူ ထိန်းချုပ်နိုင်သည်။ ဤမော်တာများသည် အပူကို ကောင်းစွာကိုင်တွယ်နိုင်ပြီး ၎င်းတို့ကို ကြာရှည်ခံအောင် ကူညီပေးသည်။
ထူးခြားချက် |
ရှင်းလင်းချက် |
လှည့်နှုန်း |
သွင်းအားဖြည့် ပဲမျိုးစုံ နှင့် တက်သည် ။ နှေးကွေးသောအမြန်နှုန်းများသည် ပြဿနာများကို ဖြစ်စေနိုင်သည်။ |
Load Torque သက်ရောက်မှု |
လေးလံသောဝန်များသည် မော်တာလည်ပတ်မှုကို နှေးကွေးစေသည်။ |
ဗို့အားလျှောက်လွှာ |
ဗို့အားများလေလေ မော်တာအား ပိုမြန်စေသည်။ |
မှတ်ချက်- မြင့်မားသော rpm သည် torque နည်းပါးပြီး ပါဝါပိုမိုအသုံးပြုခြင်းကို ဆိုလိုပါသည်။ အမြန်နှုန်းကို ခွန်အားနှင့် ထိရောက်မှုတို့ဖြင့် ချိန်ညှိရန် လိုအပ်သည်။
စွမ်းဆောင်ရည်အချက် |
ဖော်ပြချက် |
မြင့်မားသော RPM |
Coreless မော်တာများသည် အလွန်လျင်မြန်သော်လည်း ပျက်စီးမှုမဖြစ်စေရန် ဂရုတစိုက်အသုံးပြုရန် လိုအပ်ပါသည်။ |
Torque |
rpm တက်လာရင် torque ကျသွားနိုင်ပါတယ်။ |
ပါဝါစားသုံးမှု |
ပိုမြန်သော အမြန်နှုန်းများသည် စွမ်းဆောင်ရည်ကို နိမ့်ကျစေသည့် ပါဝါကို ပိုမိုအသုံးပြုသည်။ |
လျှောက်လွှာ Fit
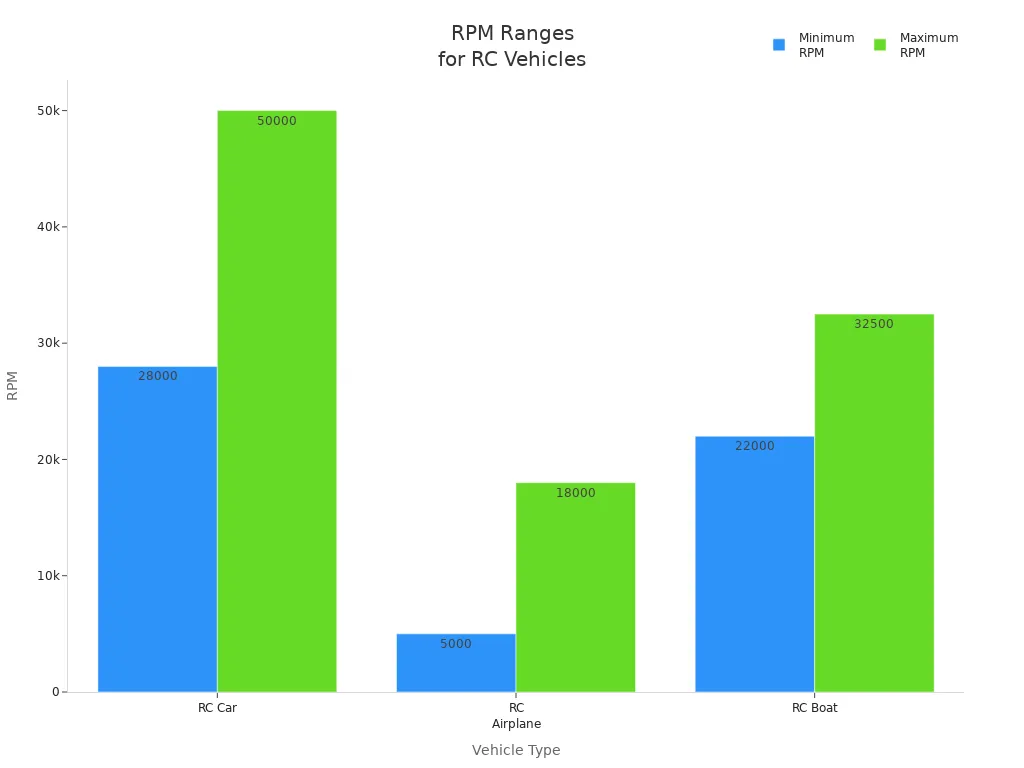
သင့်ပရောဂျက်အတွက် မှန်ကန်သော rpm ကို သင်ရွေးချယ်ရန်လိုအပ်သည်။ မတူညီသော စက်များသည် မတူညီသော အမြန်နှုန်းများ လိုအပ်သည်။ ဒရုန်းများသည် လျင်မြန်စွာ လည်ပတ်ပြီး လွှင့်တင်ရန် မြင့်မားသော rpm လိုအပ်သည်။ ဆေးဘက်ဆိုင်ရာ ကိရိယာများသည် ငြိမ်သက်ပြီး တည်ငြိမ်သော မော်တာများ လိုအပ်သည်။ အရုပ်များသည် လုံခြုံပြီး မမြန်လွန်းသော မော်တာများ လိုအပ်ပါသည်။ အောက်ဖော်ပြပါဇယားသည် အသုံးပြုမှုတစ်ခုစီတိုင်း၏ rpm နှင့်မည်မျှကိုက်ညီသည်ကိုပြသသည်-
လျှောက်လွှာ |
RPM အတိုင်းအတာ |
အဓိကအင်္ဂါရပ်များ |
ဒရုန်း |
30,000 အထိ |
မြင့်မားသော ပါဝါ-အလေးချိန်အချိုး၊ ပေါ့ပါးပြီး တိုးချဲ့ပျံသန်းမှုအတွက် မြင့်မားသော စွမ်းဆောင်ရည်။ |
ဆေးဘက်ဆိုင်ရာကိရိယာများ |
ကွဲပြားသည်။ |
ဆူညံသံနည်းပါးခြင်း၊ တိကျသောထိန်းချုပ်မှု၊ အရေးကြီးသောအလုပ်များအတွက် ယုံကြည်စိတ်ချရမှု။ |
အရုပ်များ |
33000 အထိ |
ကျစ်လစ်သောအရွယ်အစား၊ အဝေးထိန်းခလုတ်နှင့် မော်ဒယ်များအတွက် ထိရောက်သောလည်ပတ်မှု။ |
ဒရုန်းများ- မြင့်မားသော rpm သည် ၎င်းတို့အား ရုတ်သိမ်းရန်နှင့် လျင်မြန်စွာ ရွေ့လျားရန် ကူညီပေးသည်။
ဆေးဘက်ဆိုင်ရာကိရိယာများ- rpm နိမ့်သည် ၎င်းတို့ကို ငြိမ်သက်စေပြီး တည်ငြိမ်စေသည်။
အရုပ်များ- အလယ်အလတ် rpm သည် ၎င်းတို့ကို ပျော်ရွှင်စေပြီး ဘေးကင်းစေသည်။
သင့်ပရောဂျက်အတွက် လိုအပ်သည့် rpm ကို အမြဲစစ်ဆေးပါ။ မှန်ကန်သောအမြန်နှုန်းကို ရွေးချယ်ခြင်းသည် သင့်စက်ကို ကောင်းမွန်စွာအလုပ်လုပ်စေပြီး ကြာရှည်အသုံးပြုနိုင်စေသည်။
micro coreless မော်တာများသည် 20,000 မှ 66,000 rpm မှ လည်ပတ်နေကြောင်း သင်သိရှိလာခဲ့သည်။ မြန်နှုန်းသည် ဗို့အား၊ ဝန်နှင့် မော်တာတည်ဆောက်ပုံတို့အပေါ် မူတည်သည်။ အဆင့်သတ်မှတ်ထားသော rpm ကိုရှာရန် ဒေတာစာရွက်ကို အမြဲကြည့်ရှုပါ။ သင့်ပရောဂျက်အတွက် အမြန်နှုန်းကိုလည်း တိုင်းတာသင့်သည်။ အောက်ဖော်ပြပါဇယားတွင် အဓိကအချက်များကို ပြသသည်-
အဓိကရှုထောင့် |
အသေးစိတ် |
RPM အတိုင်းအတာ |
ပုံမှန် 20,000–66,000 rpm |
လွှမ်းမိုးမှုရှိသောအချက်များ |
ဗို့အား၊ ဝန်၊ မော်တာဒီဇိုင်း |
အတိုင်းအတာ |
တာတိုမီတာ၊ DIY သို့မဟုတ် တွက်ချက်မှု |
လျှောက်လွှာ Fit |
ဒရုန်းများ၊ ဆေးဘက်ဆိုင်ရာ၊ စက်ရုပ်များ၊ အရုပ်များ |
rpm သည် သင့်ပရောဂျက်လိုအပ်ချက်နှင့် ကိုက်ညီကြောင်း သေချာပါစေ။ မှန်ကန်သော kv ကိုရွေးချယ်ပြီး specs များကိုစစ်ဆေးခြင်းသည် မော်တာပြဿနာများကို ရပ်တန့်စေနိုင်သည်။
အမြဲမေးလေ့ရှိသောမေးခွန်းများ
မိုက်ခရိုမော်တာတွင် 'coreless' ဆိုသည်မှာ အဘယ်နည်း။
coreless motor သည် သံ core မပါဘဲ coil ကိုအသုံးပြုသည်။ တုံ့ပြန်မှု ပိုမြန်ပြီး ကိုယ်အလေးချိန်လည်း နည်းပါတယ်။ ဤဒီဇိုင်းသည် မော်တာလှည့်ပတ်မှုကို လျင်မြန်ချောမွေ့စွာ ကူညီပေးသည်။
micro coreless motor ၏ rpm ကို သင် ထိန်းချုပ်နိုင်ပါသလား။
ဟုတ်ကဲ့၊ ဗို့အားကိုပြောင်းလဲခြင်း သို့မဟုတ် မော်တာထိန်းချုပ်ကိရိယာကို အသုံးပြုခြင်းဖြင့် သင်သည် rpm ကိုထိန်းချုပ်နိုင်သည်။ ဗို့အားနိမ့်သည် မော်တာကို နှေးစေသည်။ မြင့်မားသောဗို့အားသည်၎င်းကိုပိုမိုမြန်ဆန်စွာလည်ပတ်စေသည်။
load တစ်ခုထည့်တဲ့အခါ ဘာကြောင့် rpm ကျသွားတာလဲ။
ဝန်ကိုထည့်သောအခါ၊ မော်တာသည် ပိုအလုပ်လုပ်သည်။ အပိုအလေးချိန်ကိုလှည့်ရန် မော်တာသည် ပါဝါပိုလိုအပ်သောကြောင့် အရှိန်ကျဆင်းသွားသည်။ ပိုလေးသောဝန်ဖြင့် အောက်ပိုင်း rpm ကိုသင်တွေ့နိုင်သည်။
မင်းရဲ့ မော်တာ အရမ်းမြန်နေသလား ဘယ်လိုသိနိုင်မလဲ။
အပိုအပူရှိန်၊ ဆူညံသံ သို့မဟုတ် တုန်ခါမှုကို သတိပြုမိနိုင်သည်။ မော်တာသည် ကြာရှည်မခံပါ။ သင့်မော်တာဘေးကင်းစေရန်အတွက် ထုတ်လုပ်သူ၏ rpm ကန့်သတ်ချက်ကို အမြဲစစ်ဆေးပါ။
ဗို့အားအလွန်အကျွံသုံးရင် ဘာဖြစ်မလဲ။
ဗို့အားများလွန်းပါက မော်တာကို အပူလွန်ကဲစေနိုင်သည်။ အကွေ့အကောက်များကို ပျက်စီးစေခြင်း သို့မဟုတ် မော်တာ၏သက်တမ်းကို တိုစေနိုင်သည်။ ဘေးကင်းသောလုပ်ဆောင်ချက်အတွက် အကြံပြုထားသော ဗို့အားကို အမြဲသုံးပါ။