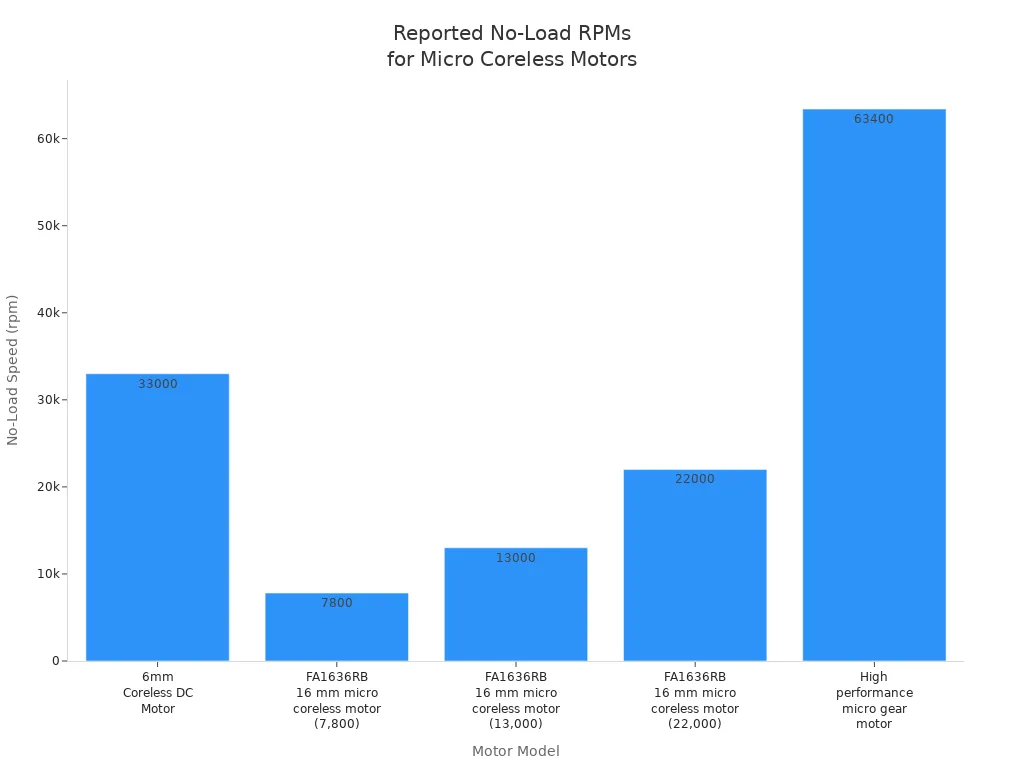
A menudo encuentras que un El micromotor sin núcleo gira a velocidades de aproximadamente 20 000 a 66 000 rpm cuando se alimenta con 3 a 4 voltios. Rpm significa revoluciones por minuto, lo que indica qué tan rápido gira el eje del motor. Esta velocidad es importante porque afecta la cantidad de energía que puede entregar su dispositivo. Por ejemplo, la siguiente tabla muestra números de rpm reales para diferentes modelos.
Modelo |
Velocidad sin carga (rpm) |
Motor CC sin núcleo de 6 mm |
33.000 ± 10% |
FA1636RB micromotor sin núcleo de 16 mm |
7.800, 13.000, 22.000, 22.000 |
Micro motorreductor de alto rendimiento. |
63.400 |
Conclusiones clave
Los micromotores sin núcleo suelen girar entre 20.000 y 66.000 rpm. Necesitan de 3 a 4 voltios para funcionar. Mire las especificaciones para saber la velocidad exacta de su motor.
Las rpm sin carga son mayores que las rpm con carga. Si agrega peso o resistencia, el motor se desacelera. Piense siempre en la carga al elegir un motor para su proyecto.
Darle más voltaje al motor hace que gire más rápido. Utilice el voltaje adecuado para no romper el motor. Esto le ayuda a obtener la velocidad que desea.
Utilice un tacómetro para comprobar exactamente las rpm del motor. También puedes utilizar métodos de bricolaje, como sensores ópticos o aplicaciones, para comprobar la velocidad.
Elegir las rpm correctas es muy importante para su dispositivo. Diferentes cosas, como drones o dispositivos médicos, necesitan ciertas velocidades para funcionar mejor.
Rango de RPM del micromotor sin núcleo
Valores típicos de RPM
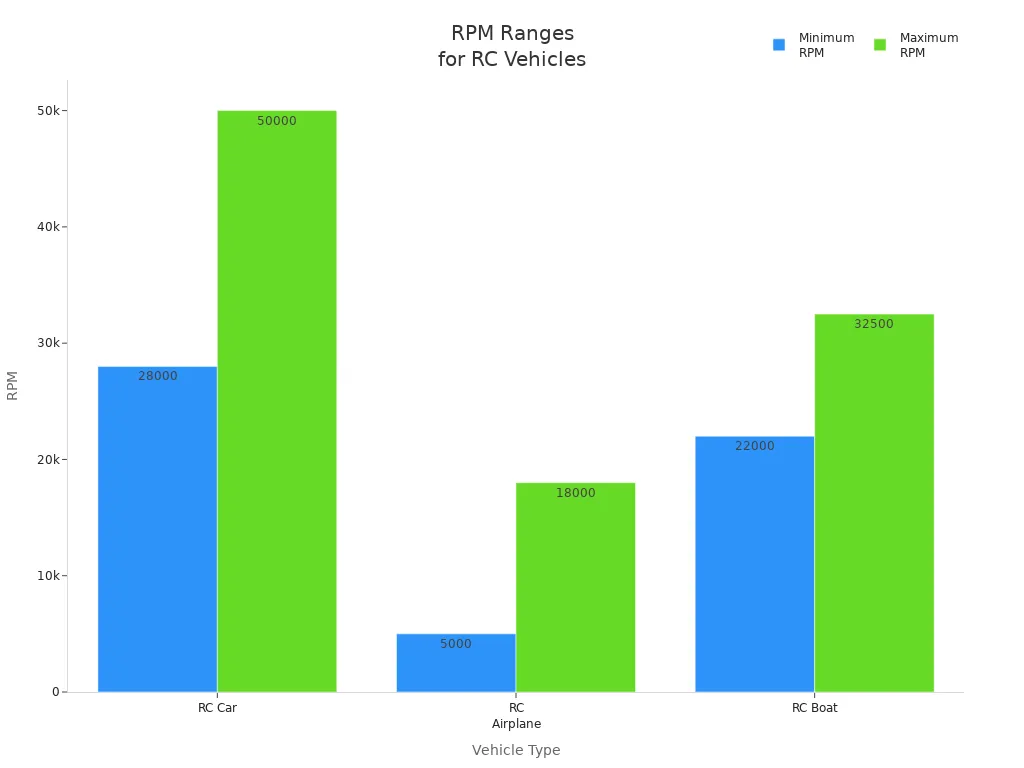
Puede encontrar una amplia gama de valores de rpm cuando observa Micromotores sin núcleo . La mayoría de los modelos funcionan entre 20.000 y 66.000 rpm cuando funcionan con 3 o 4 voltios. Algunos motores diseñados para drones RC o aplicaciones de alta velocidad alcanzan velocidades aún mayores. A continuación se muestran algunos ejemplos:
Un micromotor sin núcleo utilizado en drones RC puede alcanzar hasta 10.230 rpm a 24 voltios con una corriente continua de 566 mA.
Muchos motores micro sin núcleo estándar giran a 33.000 rpm o más en condiciones sin carga.
Los modelos de alto rendimiento pueden alcanzar velocidades superiores a 50.000 rpm.
Siempre debes verificar las especificaciones de tu motor. Los fabricantes enumeran la velocidad sin carga, que muestra qué tan rápido gira el motor sin ninguna resistencia.
RPM sin carga frente a cargadas
Cuando utiliza un motor micro sin núcleo, notará una diferencia entre las rpm sin carga y las rpm con carga. Las rpm sin carga significan que el motor gira libremente, sin que nada lo ralentice. Las rpm cargadas ocurren cuando se conecta una hélice, un engranaje u otro dispositivo que crea resistencia.
Las rpm caen cuando agregas una carga porque el motor trabaja más para superar la resistencia. La EMF (fuerza electromotriz) trasera disminuye, lo que reduce la velocidad. El motor desacelera hasta que la corriente y el par se equilibran con la carga.
Esto es lo que puede esperar:
Las rpm sin carga siempre son mayores que las rpm con carga.
La velocidad disminuye a medida que aumenta la carga.
La disminución exacta depende del tamaño de la carga y del diseño del motor.
Si desea que su dispositivo funcione a una determinada velocidad, debe considerar las rpm sin carga y con carga. Esto le ayuda a elegir el micromotor sin núcleo adecuado para su proyecto.
Factores que afectan las RPM
Impacto de voltaje
El voltaje que se suministra a un micromotor sin núcleo tiene un gran efecto en su velocidad. Cuando aumenta el voltaje, las rpm aumentan. Si bajas el voltaje, el motor gira más lento. La mayoría de los mini motores de CC funcionan mejor entre 1,5 y 100 voltios. Las opciones comunes son 3V, 6V o 12V. Por ejemplo, si usas una batería de 3V, el motor girará a una velocidad determinada. Si cambia a una batería de 6 V, las rpm aumentarán. Esto sucede porque más voltaje empuja más corriente a través del motor, lo que hace que gire más rápido.
Consejo: siempre verifique el voltaje recomendado para su motor. Demasiado voltaje puede dañarlo, mientras que muy poco puede no proporcionar suficiente velocidad.
Efectos de carga
La carga es cualquier cosa que el motor tenga que mover, como una hélice o un engranaje. Cuando agregas una carga, las rpm bajan. El motor trabaja más para hacer girar el peso extra. Si añades una carga pesada, la velocidad baja aún más. Por ejemplo, un micromotor sin núcleo que gira libremente podría alcanzar las 33.000 rpm. Si conecta un ventilador pequeño, la velocidad podría bajar a 28.000 rpm. Un ventilador más grande lo ralentizaría aún más.
Siempre debes pensar en la carga cuando eliges un motor para tu proyecto.
Diseño de motores
El diseño del motor también afecta a sus revoluciones. Un micromotor sin núcleo utiliza una bobina sin núcleo liviana. Este diseño le confiere algunas características especiales:
Aceleración rápida y alta eficiencia gracias a su construcción liviana
Baja inercia, lo que significa que el motor responde rápidamente a los cambios de velocidad.
Funcionamiento suave y estable gracias al par de engranaje reducido
Alta potencia de salida en un tamaño pequeño, lo que ayuda en espacios reducidos
Los motores con imanes potentes, tipos de devanados especiales y rotores pequeños pueden girar más rápido. El diseño sin núcleo también significa menos ruido y una curva de velocidad más suave. Verá estos beneficios en dispositivos como drones, herramientas médicas y robótica, donde la velocidad y el control son lo más importante.
Medición de RPM
Uso del tacómetro
Un tacómetro le ayuda a saber qué tan rápido gira un motor. Esta herramienta muestra la velocidad de inmediato y es muy precisa. Algunos tacómetros digitales utilizan un láser para comprobar el movimiento. Apuntas el láser a un punto brillante del motor. Luego, la pantalla muestra el número de rpm. Estos tacómetros pueden medir velocidades de 10 a 99.999 rpm. Trabajan a una distancia de unos 50 mm a 200 mm. No es necesario tocar el motor, por lo que no hay resistencia adicional.
Característica |
Descripción |
Tipo |
Tacómetro digital sin contacto |
Rango de medición de RPM |
10,0 a 99.999 RPM |
Método de medición |
No intrusivo, mediante láser. |
Mostrar |
Retroiluminación LCD, muestra RPM y conteo de revoluciones. |
Distancia objetivo |
50 mm a 200 mm |
Duración de la batería |
Funcionamiento continuo durante 12 horas. |
Si necesita resultados más exactos, puede utilizar un generador tacómetro de CC. Esta herramienta cambia la velocidad de giro en una señal de voltaje. Es bueno para laboratorios y servosistemas.
Métodos de bricolaje
Puedes comprobar las rpm en casa o en clase de muchas formas. Puede utilizar un sensor óptico para detectar marcas en el eje giratorio. Podrías construir un contador de RPM con contadores y números LED. Algunas aplicaciones de teléfono usan la cámara para calcular las rpm.
Consejo: Los sensores ópticos y las aplicaciones del teléfono son rápidos y fáciles de usar. No necesita herramientas especiales y la configuración es sencilla.
También puedes usar un sensor de proximidad o verificar el EMF trasero para encontrar una forma económica de medir la velocidad. Contar con un reloj rápido te ayuda a obtener buenos resultados, incluso a velocidades lentas.
Calcular a partir de especificaciones
Puedes adivinar las rpm usando la clasificación Kv y el voltaje que usas. La clasificación Kv le indica cuántas veces gira el motor por cada voltio. Aquí hay una fórmula simple:
RPM = Kv × Voltaje
Por ejemplo, si tu motor tiene un Kv de 1000 y usas 10 voltios, las rpm son 10.000. Si tiene un motor de 2300 Kv y una batería de 14,8 V, las rpm son aproximadamente 34.040. Mire siempre los datos del fabricante para obtener la mejor respuesta. De esta manera, podrás conocer la velocidad antes de encender tu micro motor sin núcleo.
Por qué son importantes las RPM
Actuación
Las RPM son importantes para determinar qué tan bien funciona su motor. Si utiliza un micromotor sin núcleo, querrá que se mueva rápido y sin problemas. Unas rpm más altas permiten que el motor reaccione rápidamente. Esto es bueno para cosas que necesitan velocidad y precisión, como robots o pequeños dispositivos. La siguiente tabla muestra cómo las rpm cambian el rendimiento:
Especificación |
Valor |
Tensión nominal |
3,0 V |
Velocidad nominal |
14.000 ± 2.500 rpm |
Dimensiones |
11,9 mm x 4,6 mm x 4,9 mm |
Idoneidad de la aplicación |
Robótica y dispositivos electrónicos miniaturizados. |
Impacto en el rendimiento |
Unas RPM más altas conducen a una actuación y una capacidad de respuesta más rápidas, cruciales para la precisión y el movimiento rápido. |
Obtienes más que solo velocidad con estos motores. Los micromotores sin núcleo arrancan y se detienen rápidamente. Dan gran potencia en un tamaño pequeño. Funcionan sin problemas, por lo que puedes controlarlos fácilmente. Estos motores también soportan bien el calor, lo que les ayuda a durar más.
Característica |
Explicación |
Velocidad de rotación |
Sube con más pulsos de entrada; Las velocidades lentas pueden causar problemas. |
Impacto del par de carga |
Las cargas pesadas hacen que el motor gire más lento. |
Aplicación de voltaje |
Más voltaje hace que el motor gire más rápido. |
Nota: Las altas revoluciones pueden significar menos torque y más uso de energía. Necesitas equilibrar la velocidad con la fuerza y la eficiencia.
Factor de rendimiento |
Descripción |
RPM altas |
Los motores sin núcleo pueden funcionar muy rápido pero necesitan un uso cuidadoso para evitar daños. |
Esfuerzo de torsión |
Si las rpm aumentan, el par puede disminuir. |
Consumo de energía |
Las velocidades más rápidas consumen más energía, lo que puede reducir la eficiencia. |
Ajuste de la aplicación
Debe elegir las rpm adecuadas para su proyecto. Diferentes dispositivos necesitan diferentes velocidades. Los drones necesitan altas revoluciones para girar rápido y despegar. Los dispositivos médicos necesitan motores que sean silenciosos y estables. Los juguetes necesitan motores que sean seguros y no demasiado rápidos. La siguiente tabla muestra cómo las rpm se adaptan a cada uso:
Solicitud |
Rango de RPM |
Características clave |
Drones |
Hasta 30.000 |
Alta relación potencia-peso, peso ligero y alta eficiencia para vuelos prolongados. |
Dispositivos médicos |
Varía |
Bajo nivel de ruido, control preciso y confiabilidad para tareas críticas. |
juguetes |
Hasta 33.000 |
Tamaño compacto, funcionamiento eficiente para control remoto y modelos. |
Drones: las altas revoluciones les ayudan a levantarse y moverse rápido.
Dispositivos médicos: las rpm más bajas los mantienen silenciosos y estables.
Juguetes: Las revoluciones medias los hacen divertidos y seguros.
Comprueba siempre qué rpm necesita tu proyecto. Elegir la velocidad adecuada ayuda a que su dispositivo funcione bien y dure más.
Ha aprendido que los micromotores sin núcleo giran entre 20.000 y 66.000 rpm. La velocidad depende del voltaje, la carga y cómo está construido el motor. Mire siempre la hoja de datos para encontrar las rpm nominales. También debes medir la velocidad de tu proyecto. La siguiente tabla muestra los puntos principales:
Aspecto clave |
Detalles |
Rango de RPM |
20 000 a 66 000 rpm típicas |
Factores que influyen |
Voltaje, carga, diseño del motor. |
Medición |
Tacómetro, bricolaje o cálculo |
Ajuste de la aplicación |
Drones, médicos, robótica, juguetes. |
Asegúrese de que las rpm coincidan con las que necesita su proyecto. Elegir el kv correcto y verificar las especificaciones puede detener los problemas del motor.
Preguntas frecuentes
¿Qué significa 'sin núcleo' en un micromotor?
Un motor sin núcleo utiliza una bobina sin núcleo de hierro. Obtienes una respuesta más rápida y menos peso. Este diseño ayuda a que el motor gire rápida y suavemente.
¿Puedes controlar las rpm de un micromotor sin núcleo?
Sí, puedes controlar las rpm cambiando el voltaje o usando un controlador de motor. Un voltaje más bajo ralentiza el motor. Un voltaje más alto hace que gire más rápido.
¿Por qué bajan las rpm cuando agregas una carga?
Cuando agregas una carga, el motor trabaja más. La velocidad disminuye porque el motor necesita más potencia para hacer girar el peso extra. Ves rpm más bajas con cargas más pesadas.
¿Cómo saber si su motor gira demasiado rápido?
Es posible que notes calor, ruido o vibración adicionales. Es posible que el motor no dure tanto. Siempre verifique el límite de rpm del fabricante para mantener su motor seguro.
¿Qué pasa si usas demasiado voltaje?
Demasiado voltaje puede sobrecalentar el motor. Podría dañar los devanados o acortar la vida útil del motor. Utilice siempre el voltaje recomendado para un funcionamiento seguro.