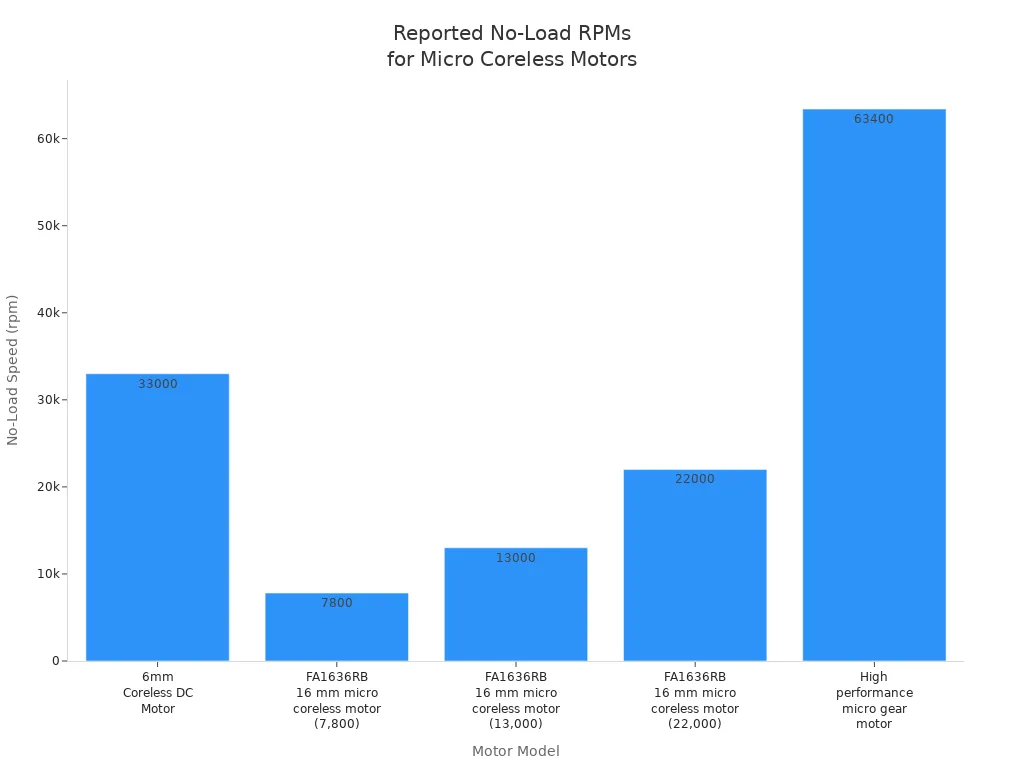
Muitas vezes você descobre que um O micro motor sem núcleo gira em velocidades de cerca de 20.000 a 66.000 rpm quando alimentado por 3 a 4 volts. Rpm significa rotações por minuto, o que indica a rapidez com que o eixo do motor gira. Essa velocidade é importante porque afeta a quantidade de energia que seu dispositivo pode fornecer. Por exemplo, a tabela abaixo mostra números de rpm reais para diferentes modelos.
Modelo |
Velocidade sem carga (rpm) |
Motor DC sem núcleo de 6 mm |
33.000 ± 10% |
FA1636RB micro motor sem núcleo de 16 mm |
7.800, 13.000, 22.000, 22.000 |
Motor microredutor de alto desempenho |
63.400 |
Principais conclusões
Micro motores sem núcleo geralmente giram de 20.000 a 66.000 rpm. Eles precisam de 3 a 4 volts para funcionar. Consulte as especificações para saber a velocidade exata do seu motor.
A rotação sem carga é maior que a rotação com carga. Se você adicionar peso ou resistência, o motor desacelera. Sempre pense na carga ao escolher um motor para o seu projeto.
Dar mais tensão ao motor faz com que ele gire mais rápido. Use a voltagem correta para não quebrar o motor. Isso ajuda você a obter a velocidade desejada.
Use um tacômetro para verificar exatamente a rotação do motor. Você também pode usar métodos DIY, como sensores ópticos ou aplicativos para verificar a velocidade.
Escolher a rotação certa é muito importante para o seu dispositivo. Coisas diferentes, como drones ou dispositivos médicos, precisam de certas velocidades para funcionar melhor.
Faixa de rpm do motor micro coreless
Valores típicos de RPM
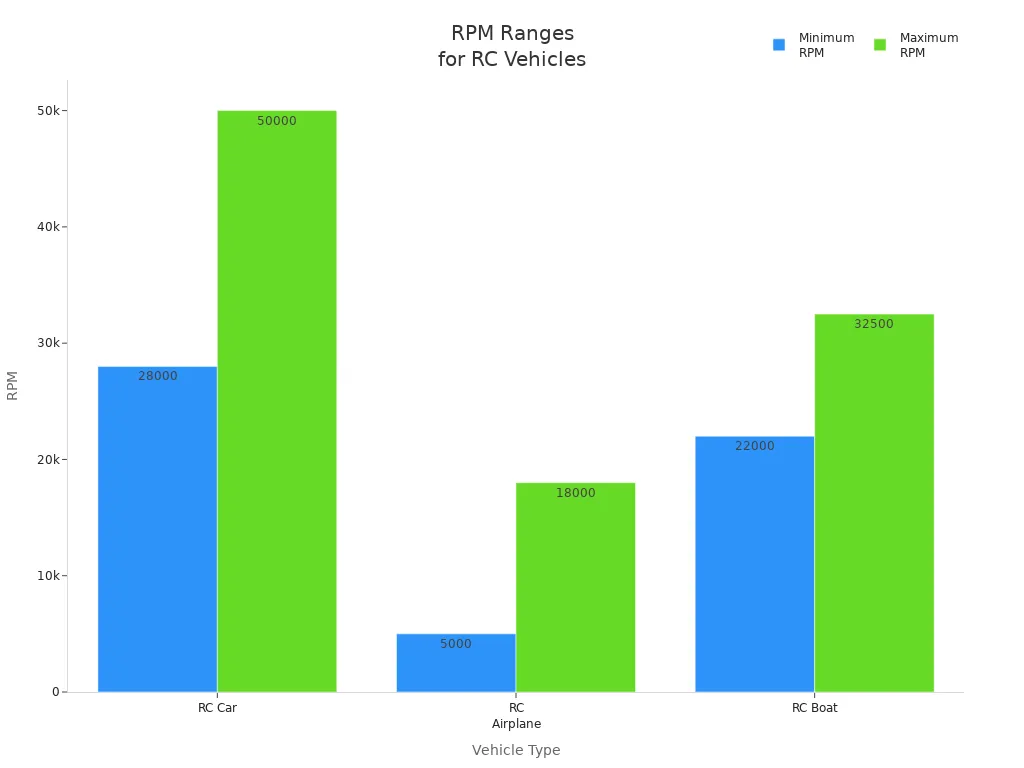
Você pode encontrar uma ampla gama de valores de rpm quando olha para micro motores sem núcleo . A maioria dos modelos funciona entre 20.000 e 66.000 rpm quando alimentado por 3 a 4 volts. Alguns motores projetados para drones RC ou aplicações de alta velocidade atingem velocidades ainda mais altas. Aqui estão alguns exemplos:
Um micro motor sem núcleo usado em drones RC pode atingir até 10.230 rpm a 24 volts com uma corrente contínua de 566mA.
Muitos micromotores sem núcleo padrão giram a 33.000 rpm ou mais em condições sem carga.
Os modelos de alto desempenho podem atingir velocidades acima de 50.000 rpm.
Você deve sempre verificar as especificações do seu motor. Os fabricantes listam a velocidade sem carga, que mostra a rapidez com que o motor gira sem qualquer resistência.
RPM sem carga vs. carregado
Ao usar um micro motor sem núcleo, você notará uma diferença entre rpm sem carga e rpm com carga. RPM sem carga significa que o motor gira livremente, sem que nada o desacelere. A rpm carregada acontece quando você conecta uma hélice, engrenagem ou outro dispositivo que cria resistência.
A rpm cai quando você adiciona uma carga porque o motor trabalha mais para superar a resistência. O EMF traseiro (força eletromotriz) diminui, o que diminui a velocidade. O motor desacelera até que a corrente e o torque se equilibrem com a carga.
Aqui está o que você pode esperar:
As rpm sem carga são sempre maiores que as rpm com carga.
A velocidade cai conforme você aumenta a carga.
A diminuição exata depende do tamanho da carga e do projeto do motor.
Se você deseja que seu dispositivo funcione a uma determinada velocidade, você precisa considerar as rpm sem carga e com carga. Isso ajuda você a escolher o micro motor sem núcleo certo para o seu projeto.
Fatores que afetam o RPM
Impacto de tensão
A tensão que você fornece a um micro motor sem núcleo tem um grande efeito em sua velocidade. Quando você aumenta a tensão, a rotação aumenta. Se você diminuir a tensão, o motor gira mais devagar. A maioria dos mini motores DC funciona melhor entre 1,5 e 100 volts. As escolhas comuns são 3V, 6V ou 12V. Por exemplo, se você usar uma bateria de 3V, o motor girará a uma determinada velocidade. Se você mudar para uma bateria de 6V, a rotação aumentará. Isso acontece porque mais tensão empurra mais corrente através do motor, fazendo-o girar mais rápido.
Dica: Verifique sempre a tensão recomendada para o seu motor. Muita tensão pode danificá-lo, enquanto pouca tensão pode não fornecer velocidade suficiente.
Efeitos de carga
A carga é tudo o que o motor precisa mover, como uma hélice ou uma engrenagem. Quando você adiciona uma carga, a rpm cai. O motor trabalha mais para girar o peso extra. Se você adicionar uma carga pesada, a velocidade cai ainda mais. Por exemplo, um micro motor sem núcleo girando livremente pode atingir 33.000 rpm. Se você conectar uma pequena ventoinha, a velocidade poderá cair para 28.000 rpm. Um ventilador maior desaceleraria ainda mais.
Você deve sempre pensar na carga ao escolher um motor para o seu projeto.
Projeto de motores
O design do motor também afeta suas rpm. Um micro motor sem núcleo usa uma bobina leve e sem núcleo. Este design oferece alguns recursos especiais:
Aceleração rápida e alta eficiência devido à construção leve
Baixa inércia, o que significa que o motor responde rapidamente às mudanças na velocidade
Operação suave e estável, graças ao torque de engrenagem reduzido
Alta potência em um tamanho pequeno, o que ajuda em espaços apertados
Motores com ímãs fortes, tipos de enrolamentos especiais e rotores pequenos podem girar mais rápido. O design sem núcleo também significa menos ruído e uma curva de velocidade mais suave. Você verá esses benefícios em dispositivos como drones, ferramentas médicas e robótica, onde a velocidade e o controle são mais importantes.
Medindo RPM
Uso do tacômetro
Um tacômetro ajuda você a descobrir a velocidade de rotação de um motor. Esta ferramenta mostra a velocidade imediatamente e é muito precisa. Alguns tacômetros digitais usam um laser para verificar o movimento. Você aponta o laser para um ponto brilhante no motor. A tela então mostra o número de rpm. Esses tacômetros podem medir velocidades de 10 a 99.999 rpm. Eles trabalham a cerca de 50 mm a 200 mm de distância. Você não precisa tocar no motor, portanto não há arrasto extra.
Recurso |
Descrição |
Tipo |
Tacômetro digital sem contato |
Faixa de medição de RPM |
10,0 a 99.999 RPM |
Método de medição |
Não intrusivo, usando laser |
Mostrar |
Retroiluminação LCD, mostra RPM e contagem de revoluções |
Distância alvo |
50mm a 200mm |
Vida útil da bateria |
Operação contínua por 12 horas |
Se precisar de resultados mais exatos, você pode usar um gerador de tacômetro DC. Esta ferramenta transforma a velocidade de rotação em um sinal de tensão. É bom para laboratórios e sistemas servo.
Métodos faça você mesmo
Você pode verificar as rpm em casa ou na aula de várias maneiras. Você pode usar um sensor óptico para detectar marcas no eixo giratório. Você poderia construir um contador de RPM com contadores e números de LED. Alguns aplicativos de telefone usam sua câmera para descobrir as rpm.
Dica: sensores ópticos e aplicativos de telefone são rápidos e fáceis de usar. Você não precisa de ferramentas especiais e a configuração é simples.
Você também pode usar um sensor de proximidade ou verificar o EMF traseiro para obter uma maneira barata de medir a velocidade. Contar com um clock rápido ajuda a obter bons resultados, mesmo em velocidades lentas.
Calculando a partir das especificações
Você pode adivinhar rpm usando a classificação Kv e a voltagem usada. A classificação Kv informa quantas vezes o motor gira para cada volt. Aqui está uma fórmula simples:
RPM = Kv × Tensão
Por exemplo, se o seu motor tem Kv de 1.000 e você usa 10 volts, a rpm é 10.000. Se você tiver um motor de 2.300 Kv e uma bateria de 14,8 V, a rotação será de cerca de 34.040. Sempre observe os dados do fabricante para obter a melhor resposta. Dessa forma, você pode saber a velocidade antes de ligar seu micro motor sem núcleo.
Por que o RPM é importante
Desempenho
RPM é importante para o bom funcionamento do seu motor. Se você usar um micro motor sem núcleo, deseja que ele se mova de forma rápida e suave. Uma rotação mais alta permite que o motor reaja rapidamente. Isso é bom para coisas que precisam de velocidade e precisão, como robôs ou pequenos dispositivos. A tabela abaixo mostra como o rpm altera o desempenho:
Especificação |
Valor |
Tensão nominal |
3,0V |
Velocidade nominal |
14.000 ± 2.500 rpm |
Dimensões |
11,9 mm x 4,6 mm x 4,9 mm |
Adequação da aplicação |
Robótica e dispositivos eletrônicos miniaturizados |
Impacto no desempenho |
RPM mais altas levam a uma atuação e capacidade de resposta mais rápidas, cruciais para precisão e movimentos rápidos. |
Você obtém mais do que apenas velocidade com esses motores. Micromotores sem núcleo iniciam e param rapidamente. Eles fornecem grande poder em um tamanho pequeno. Eles funcionam suavemente, para que você possa controlá-los facilmente. Esses motores também lidam bem com o calor, o que os ajuda a durar mais.
Recurso |
Explicação |
Velocidade de rotação |
Sobe com mais pulsos de entrada; velocidades lentas podem causar problemas. |
Impacto do torque de carga |
Cargas pesadas fazem o motor girar mais devagar. |
Aplicação de tensão |
Mais tensão faz o motor girar mais rápido. |
Nota: Altas rotações podem significar menos torque e mais consumo de energia. Você precisa equilibrar velocidade com força e eficiência.
Fator de desempenho |
Descrição |
Alta rotação |
Os motores sem núcleo podem funcionar muito rápido, mas precisam de uso cuidadoso para evitar danos. |
Torque |
Se a rotação aumentar, o torque pode diminuir. |
Consumo de energia |
Velocidades mais rápidas consomem mais energia, o que pode diminuir a eficiência. |
Ajuste de aplicação
Você precisa escolher a rotação certa para o seu projeto. Dispositivos diferentes precisam de velocidades diferentes. Os drones precisam de altas rotações para girar rapidamente e decolar. Os dispositivos médicos precisam de motores silenciosos e estáveis. Os brinquedos precisam de motores que sejam seguros e não muito rápidos. A tabela abaixo mostra como o rpm se adapta a cada uso:
Aplicativo |
Faixa de rotação |
Principais recursos |
Drones |
Até 30.000 |
Alta relação potência-peso, leveza e alta eficiência para vôos prolongados. |
Dispositivos Médicos |
Varia |
Baixo ruído, controle preciso e confiabilidade para tarefas críticas. |
Brinquedos |
Até 33.000 |
Tamanho compacto, operação eficiente para controle remoto e modelos. |
Drones: altas rotações os ajudam a levantar e se mover rapidamente.
Dispositivos médicos: A rotação mais baixa os mantém silenciosos e estáveis.
Brinquedos: A rotação média os torna divertidos e seguros.
Verifique sempre qual rpm seu projeto precisa. Escolher a velocidade certa ajuda seu dispositivo a funcionar bem e durar mais.
Você aprendeu que os micro motores sem núcleo giram de 20.000 a 66.000 rpm. A velocidade depende da tensão, da carga e de como o motor é construído. Sempre consulte a folha de dados para encontrar a rotação nominal. Você também deve medir a velocidade do seu projeto. A tabela abaixo mostra os principais pontos:
Aspecto Chave |
Detalhes |
Faixa de rotação |
20.000–66.000 rpm típico |
Fatores que influenciam |
Tensão, carga, projeto do motor |
Medição |
Tacômetro, DIY ou cálculo |
Ajuste de aplicação |
Drones, médicos, robótica, brinquedos |
Certifique-se de que o rpm corresponda às necessidades do seu projeto. Escolher o kv certo e verificar as especificações pode evitar problemas no motor.
Perguntas frequentes
O que significa “sem núcleo” em um micromotor?
Um motor sem núcleo usa uma bobina sem núcleo de ferro. Você obtém uma resposta mais rápida e menos peso. Este design ajuda o motor a girar de forma rápida e suave.
Você pode controlar a rotação de um micro motor sem núcleo?
Sim, você pode controlar as rpm alterando a tensão ou usando um controlador de motor. Tensão mais baixa desacelera o motor. Tensão mais alta faz com que ele gire mais rápido.
Por que a rpm cai quando você adiciona uma carga?
Quando você adiciona uma carga, o motor trabalha mais. A velocidade cai porque o motor precisa de mais potência para girar o peso extra. Você vê rpm mais baixas com cargas mais pesadas.
Como saber se o seu motor está girando muito rápido?
Você pode notar calor, ruído ou vibração extra. O motor pode não durar tanto. Sempre verifique o limite de rpm do fabricante para manter seu motor seguro.
O que acontece se você usar muita voltagem?
Muita tensão pode superaquecer o motor. Você pode danificar os enrolamentos ou reduzir a vida útil do motor. Sempre use a tensão recomendada para uma operação segura.