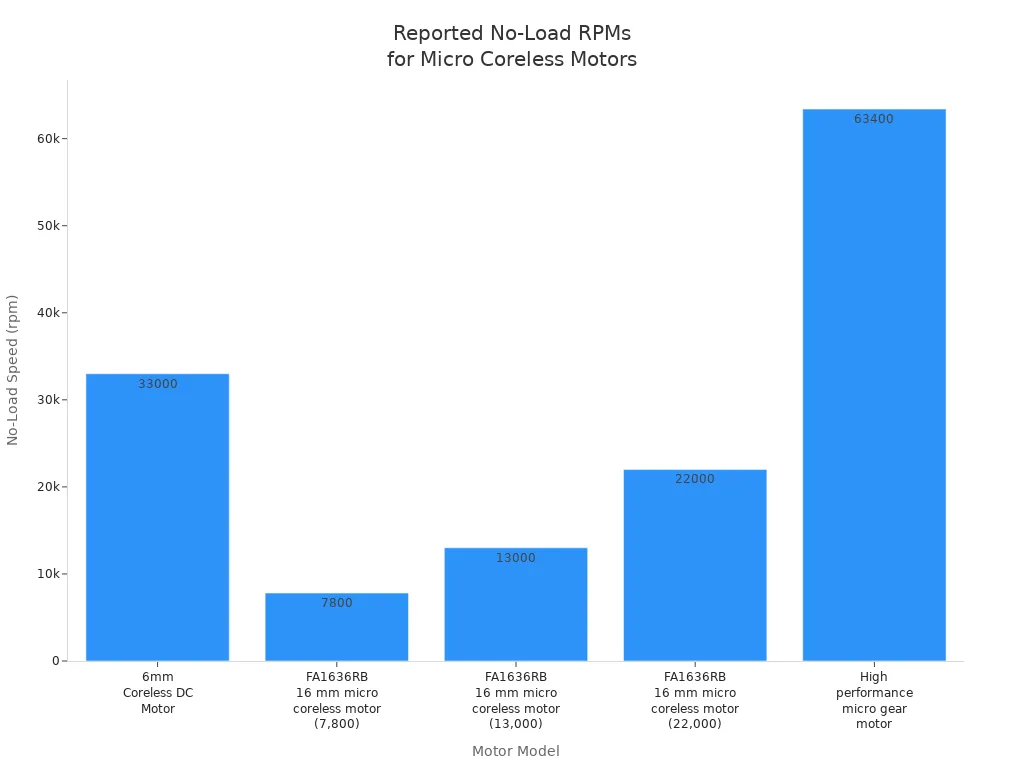
Anda sering menemukan bahwa a motor mikro tanpa inti berputar dengan kecepatan sekitar 20.000 hingga 66.000 rpm bila ditenagai oleh 3 hingga 4 volt. Rpm adalah singkatan dari revolutions per Minute, yang menunjukkan seberapa cepat poros motor berputar. Kecepatan ini penting karena memengaruhi seberapa besar daya yang dapat dihasilkan perangkat Anda. Misalnya, tabel di bawah menunjukkan angka rpm sebenarnya untuk berbagai model.
Model |
Kecepatan Tanpa Beban (rpm) |
Motor DC Tanpa Biji 6mm |
33.000 ± 10% |
Motor tanpa inti mikro FA1636RB 16 mm |
7.800, 13.000, 22.000, 22.000 |
Motor roda gigi mikro berkinerja tinggi |
63.400 |
Poin Penting
Motor mikro tanpa inti biasanya berputar pada 20.000 hingga 66.000 rpm. Mereka membutuhkan 3 hingga 4 volt untuk bekerja. Lihatlah spesifikasinya untuk mengetahui kecepatan pasti motor Anda.
Rpm tanpa beban lebih tinggi dari rpm bermuatan. Jika Anda menambah beban atau hambatan, motor akan melambat. Selalu pikirkan beban saat memilih motor untuk proyek Anda.
Memberi motor lebih banyak tegangan membuatnya berputar lebih cepat. Gunakan voltase yang tepat agar tidak merusak motor. Ini membantu Anda mendapatkan kecepatan yang Anda inginkan.
Gunakan tachometer untuk memeriksa rpm motor dengan tepat. Anda juga dapat menggunakan cara DIY seperti sensor optik atau aplikasi untuk memeriksa kecepatan.
Memilih rpm yang tepat sangat penting untuk perangkat Anda. Berbagai hal, seperti drone atau perangkat medis, memerlukan kecepatan tertentu agar dapat berfungsi dengan baik.
Rentang RPM Motor Tanpa Biji Mikro
Nilai RPM Khas
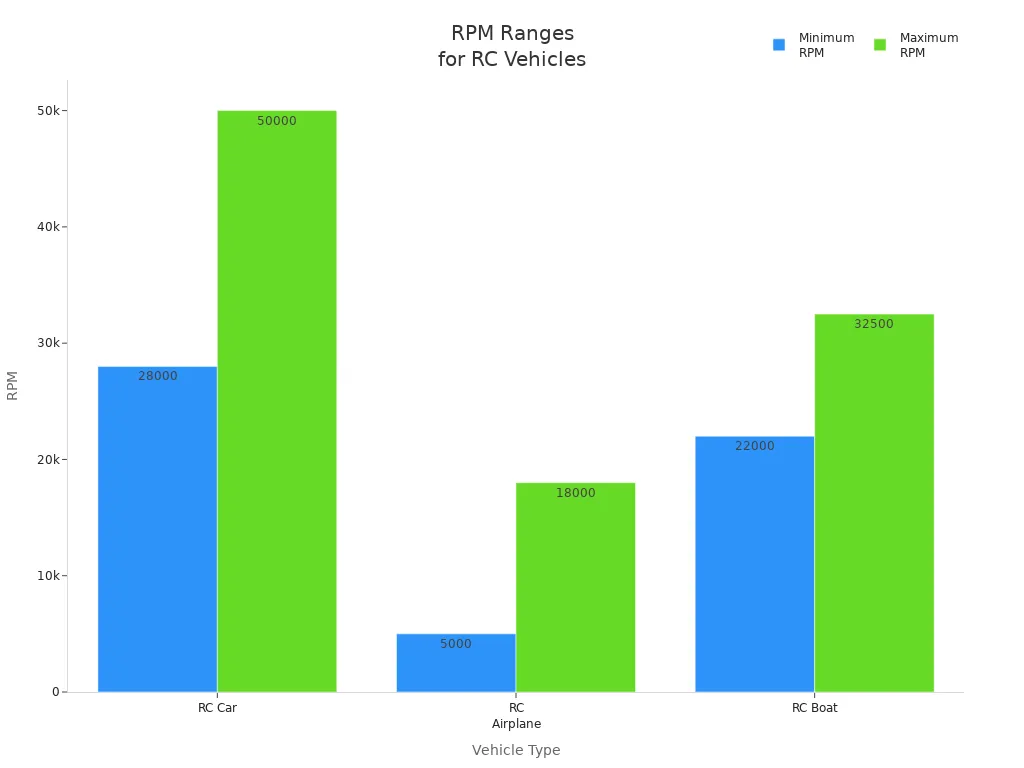
Anda dapat menemukan berbagai macam nilai rpm saat Anda melihatnya motor tanpa biji mikro . Kebanyakan model bekerja antara 20.000 dan 66.000 rpm bila diberi daya oleh 3 hingga 4 volt. Beberapa motor yang dirancang untuk drone RC atau aplikasi berkecepatan tinggi bahkan mencapai kecepatan lebih tinggi. Berikut beberapa contohnya:
Motor mikro tanpa inti yang digunakan pada drone RC dapat mencapai kecepatan hingga 10,230 rpm pada 24 volt dengan arus kontinu 566mA.
Banyak motor mikro tanpa inti standar berputar pada 33.000 rpm atau lebih dalam kondisi tanpa beban.
Model berperforma tinggi dapat mencapai kecepatan di atas 50.000 rpm.
Anda harus selalu memeriksa spesifikasi motor Anda. Pabrikan mencantumkan kecepatan tanpa beban, yang menunjukkan seberapa cepat motor berputar tanpa hambatan apa pun.
RPM Tanpa Beban vs. RPM Bermuatan
Saat Anda menggunakan motor mikro tanpa inti, Anda akan melihat perbedaan antara rpm tanpa beban dan rpm bermuatan. RPM tanpa beban berarti motor berputar bebas, tanpa ada yang memperlambatnya. RPM yang dimuat terjadi ketika Anda memasang baling-baling, roda gigi, atau perangkat lain yang menimbulkan hambatan.
RPM turun saat Anda menambah beban karena motor bekerja lebih keras untuk mengatasi hambatan. EMF belakang (gaya gerak listrik) berkurang, yang menurunkan kecepatan. Motor melambat hingga arus dan torsi seimbang dengan beban.
Inilah yang dapat Anda harapkan:
RPM tanpa beban selalu lebih tinggi dari rpm bermuatan.
Kecepatannya menurun saat Anda menambah beban.
Penurunan pastinya tergantung pada besar kecilnya beban dan desain motor.
Jika Anda ingin perangkat Anda berjalan pada kecepatan tertentu, Anda perlu mempertimbangkan rpm tanpa beban dan beban. Ini membantu Anda memilih motor mikro tanpa inti yang tepat untuk proyek Anda.
Faktor yang Mempengaruhi RPM
Dampak Tegangan
Tegangan yang Anda suplai ke motor mikro tanpa inti memiliki pengaruh besar pada kecepatannya. Saat Anda menaikkan voltase, rpm pun naik. Jika Anda menurunkan tegangan, motor berputar lebih lambat. Kebanyakan motor DC mini bekerja paling baik antara 1,5 dan 100 volt. Pilihan umum adalah 3V, 6V, atau 12V. Misalnya saja jika menggunakan baterai 3V maka motor akan berputar dengan kecepatan tertentu. Jika Anda beralih ke baterai 6V, rpm akan naik. Hal ini terjadi karena semakin banyak tegangan mendorong semakin banyak arus melalui motor, sehingga berputar lebih cepat.
Tip: Selalu periksa voltase yang disarankan untuk motor Anda. Tegangan yang terlalu besar dapat merusaknya, sedangkan tegangan yang terlalu kecil mungkin tidak memberikan kecepatan yang cukup.
Efek Beban
Beban adalah segala sesuatu yang harus digerakkan oleh motor, seperti baling-baling atau roda gigi. Saat Anda menambahkan beban, rpm turun. Motor bekerja lebih keras untuk mengubah beban ekstra. Jika Anda menambahkan beban yang berat, kecepatannya akan semakin turun. Misalnya, motor mikro tanpa inti yang berputar bebas bisa mencapai 33.000 rpm. Jika Anda memasang kipas kecil, kecepatannya bisa turun hingga 28.000 rpm. Kipas yang lebih besar akan memperlambatnya lebih jauh lagi.
Anda harus selalu memikirkan beban saat memilih motor untuk proyek Anda.
Desain Motor
Desain motor juga mempengaruhi rpm-nya. Motor mikro tanpa inti menggunakan koil yang ringan dan tanpa inti. Desain ini memberikan beberapa fitur khusus:
Akselerasi cepat dan efisiensi tinggi karena bobotnya yang ringan
Inersia rendah, yang berarti motor merespons perubahan kecepatan dengan cepat
Pengoperasian yang mulus dan stabil berkat berkurangnya torsi cogging
Output daya tinggi dalam ukuran kecil, yang membantu dalam ruang sempit
Motor dengan magnet yang kuat, jenis belitan khusus, dan rotor kecil dapat berputar lebih cepat. Desain tanpa inti juga berarti lebih sedikit noise dan kurva kecepatan lebih mulus. Anda akan melihat manfaat ini pada perangkat seperti drone, peralatan medis, dan robotika, yang mengutamakan kecepatan dan kontrol.
Mengukur RPM
Penggunaan Tachometer
Tachometer membantu Anda mengetahui seberapa cepat motor berputar. Alat ini langsung menunjukkan kecepatannya dan sangat akurat. Beberapa takometer digital menggunakan laser untuk memeriksa pergerakan. Anda mengarahkan laser ke titik mengkilap di motor. Layar kemudian menunjukkan nomor rpm. Tachometer ini dapat mengukur kecepatan dari 10 hingga 99.999 rpm. Mereka bekerja dari jarak sekitar 50mm hingga 200mm. Anda tidak perlu menyentuh motor, sehingga tidak ada hambatan tambahan.
Fitur |
Keterangan |
Jenis |
Tachometer digital non-kontak |
Rentang Pengukuran RPM |
10,0 hingga 99,999 RPM |
Metode Pengukuran |
Tidak mengganggu, menggunakan laser |
Menampilkan |
Lampu Latar LCD, menunjukkan jumlah RPM dan putaran |
Jarak Sasaran |
50mm hingga 200mm |
Daya Tahan Baterai |
Operasi terus menerus selama 12 jam |
Jika ingin hasil yang lebih presisi, Anda bisa menggunakan generator tachometer DC. Alat ini mengubah kecepatan putaran menjadi sinyal tegangan. Ini bagus untuk laboratorium dan sistem servo.
Metode DIY
Anda dapat memeriksa rpm di rumah atau di kelas dengan banyak cara. Anda mungkin menggunakan sensor optik untuk menemukan tanda pada poros yang berputar. Anda dapat membuat penghitung RPM dengan penghitung dan nomor LED. Beberapa aplikasi ponsel menggunakan kamera Anda untuk mengetahui rpm.
Tip: Sensor optik dan aplikasi telepon cepat dan mudah digunakan. Anda tidak memerlukan alat khusus, dan pengaturannya sederhana.
Anda juga dapat menggunakan sensor jarak atau memeriksa EMF belakang untuk cara murah mengukur kecepatan. Menghitung dengan jam cepat membantu Anda mendapatkan hasil yang baik, bahkan pada kecepatan lambat.
Menghitung dari Spesifikasi
Anda bisa menebak rpm menggunakan rating Kv dan voltase yang Anda gunakan. Peringkat Kv memberi tahu Anda berapa kali motor berputar untuk setiap volt. Berikut rumus sederhananya:
RPM = Kv × Tegangan
Misal motor anda mempunyai Kv 1000 dan anda menggunakan tegangan 10 volt maka rpmnya adalah 10,000. Jika Anda memiliki motor 2300Kv dan baterai 14,8V, rpmnya sekitar 34,040. Selalu lihat data pembuatnya untuk mendapatkan jawaban terbaik. Dengan cara ini, Anda dapat mengetahui kecepatan sebelum menghidupkan motor mikro tanpa inti.
Mengapa RPM Penting
Pertunjukan
RPM penting untuk seberapa baik motor Anda bekerja. Jika Anda menggunakan motor mikro tanpa inti, Anda ingin pergerakannya cepat dan lancar. RPM yang lebih tinggi memungkinkan motor bereaksi dengan cepat. Ini bagus untuk hal-hal yang membutuhkan kecepatan dan ketepatan, seperti robot atau gadget kecil. Tabel di bawah menunjukkan bagaimana rpm mengubah kinerja:
Spesifikasi |
Nilai |
Nilai Tegangan |
3.0V |
Kecepatan Terukur |
14.000 ± 2.500 rpm |
Ukuran |
11.9mm x 4.6mm x 4.9mm |
Kesesuaian Aplikasi |
Robotika dan perangkat elektronik mini |
Dampak terhadap Kinerja |
RPM yang lebih tinggi menghasilkan aktuasi dan respons yang lebih cepat, yang penting untuk presisi dan pergerakan cepat. |
Anda mendapatkan lebih dari sekedar kecepatan dengan motor ini. Motor mikro tanpa inti mulai dan berhenti dengan cepat. Mereka memberikan kekuatan yang kuat dalam ukuran kecil. Mereka berjalan dengan lancar, sehingga Anda dapat mengontrolnya dengan mudah. Motor ini juga mampu menangani panas dengan baik, sehingga membantunya bertahan lebih lama.
Fitur |
Penjelasan |
Kecepatan Rotasi |
Naik dengan lebih banyak pulsa masukan; kecepatan lambat dapat menyebabkan masalah. |
Dampak Torsi Beban |
Beban yang berat membuat putaran motor menjadi lambat. |
Aplikasi Tegangan |
Tegangan yang lebih besar membuat motor berputar lebih cepat. |
Catatan: RPM tinggi berarti torsi lebih sedikit dan penggunaan tenaga lebih banyak. Anda perlu menyeimbangkan kecepatan dengan kekuatan dan efisiensi.
Faktor Kinerja |
Keterangan |
RPM tinggi |
Motor tanpa inti dapat melaju sangat cepat tetapi perlu digunakan dengan hati-hati untuk menghindari kerusakan. |
Torsi |
Kalau rpm naik, torsi bisa turun. |
Konsumsi Daya |
Kecepatan yang lebih tinggi menggunakan lebih banyak daya, sehingga dapat menurunkan efisiensi. |
Aplikasi Cocok
Anda harus memilih rpm yang tepat untuk proyek Anda. Perangkat yang berbeda memerlukan kecepatan yang berbeda. Drone membutuhkan rpm tinggi untuk berputar cepat dan lepas landas. Peralatan medis membutuhkan motor yang senyap dan stabil. Mainan memerlukan motor yang aman dan tidak terlalu kencang. Tabel di bawah menunjukkan bagaimana rpm cocok untuk setiap penggunaan:
Aplikasi |
Rentang RPM |
Fitur Utama |
Drone |
Hingga 30.000 |
Rasio daya terhadap berat yang tinggi, ringan, efisiensi tinggi untuk penerbangan jangka panjang. |
Alat kesehatan |
Bervariasi |
Kebisingan rendah, kontrol presisi, keandalan untuk tugas-tugas penting. |
Mainan |
Hingga 33.000 |
Ukuran ringkas, pengoperasian efisien untuk remote control dan model. |
Drone: RPM tinggi membantunya terangkat dan bergerak cepat.
Peralatan medis: RPM yang lebih rendah membuatnya tetap tenang dan stabil.
Mainan: RPM sedang membuatnya menyenangkan dan aman.
Selalu periksa rpm apa yang dibutuhkan proyek Anda. Memilih kecepatan yang tepat membantu perangkat Anda bekerja dengan baik dan bertahan lebih lama.
Anda telah mempelajari bahwa motor mikro tanpa inti berputar dari 20.000 hingga 66.000 rpm. Kecepatannya tergantung pada tegangan, beban, dan cara pembuatan motor. Selalu lihat lembar data untuk mengetahui nilai rpm. Anda juga harus mengukur kecepatan proyek Anda. Tabel di bawah ini menunjukkan poin-poin utama:
Aspek Kunci |
Detail |
Rentang RPM |
Biasanya 20.000–66.000 rpm |
Faktor yang Mempengaruhi |
Tegangan, beban, desain motor |
Pengukuran |
Tachometer, DIY, atau perhitungan |
Aplikasi Cocok |
Drone, medis, robotika, mainan |
Pastikan rpm sesuai dengan kebutuhan proyek Anda. Memilih kv yang tepat dan memeriksa spesifikasinya dapat menghentikan masalah motor.
Pertanyaan Umum
Apa yang dimaksud dengan 'tanpa biji' pada motor mikro?
Motor tanpa inti menggunakan kumparan tanpa inti besi. Anda mendapatkan respons yang lebih cepat dan bobot yang lebih ringan. Desain ini membantu motor berputar dengan cepat dan lancar.
Bisakah Anda mengontrol rpm motor mikro tanpa inti?
Ya, Anda dapat mengontrol rpm dengan mengubah voltase atau menggunakan pengontrol motor. Tegangan yang lebih rendah memperlambat motor. Tegangan yang lebih tinggi membuatnya berputar lebih cepat.
Mengapa rpm turun saat menambah beban?
Saat Anda menambah beban, motor bekerja lebih keras. Kecepatannya turun karena motor membutuhkan lebih banyak tenaga untuk memutar beban ekstra. Anda melihat rpm lebih rendah dengan beban lebih berat.
Bagaimana Anda tahu jika motor Anda berputar terlalu cepat?
Anda mungkin merasakan panas, kebisingan, atau getaran ekstra. Motornya mungkin tidak akan bertahan lama. Selalu periksa batas rpm pabrikan untuk menjaga keamanan motor Anda.
Apa yang terjadi jika Anda menggunakan terlalu banyak voltase?
Terlalu banyak tegangan dapat membuat motor menjadi terlalu panas. Anda dapat merusak belitan atau memperpendek umur motor. Selalu gunakan voltase yang disarankan untuk pengoperasian yang aman.