マイクロコアレスモーターの回転数はどれくらいですか?
ビュー: 0 著者: サイト編集者 公開時間: 2025-11-24 起源: サイト
お問い合わせ

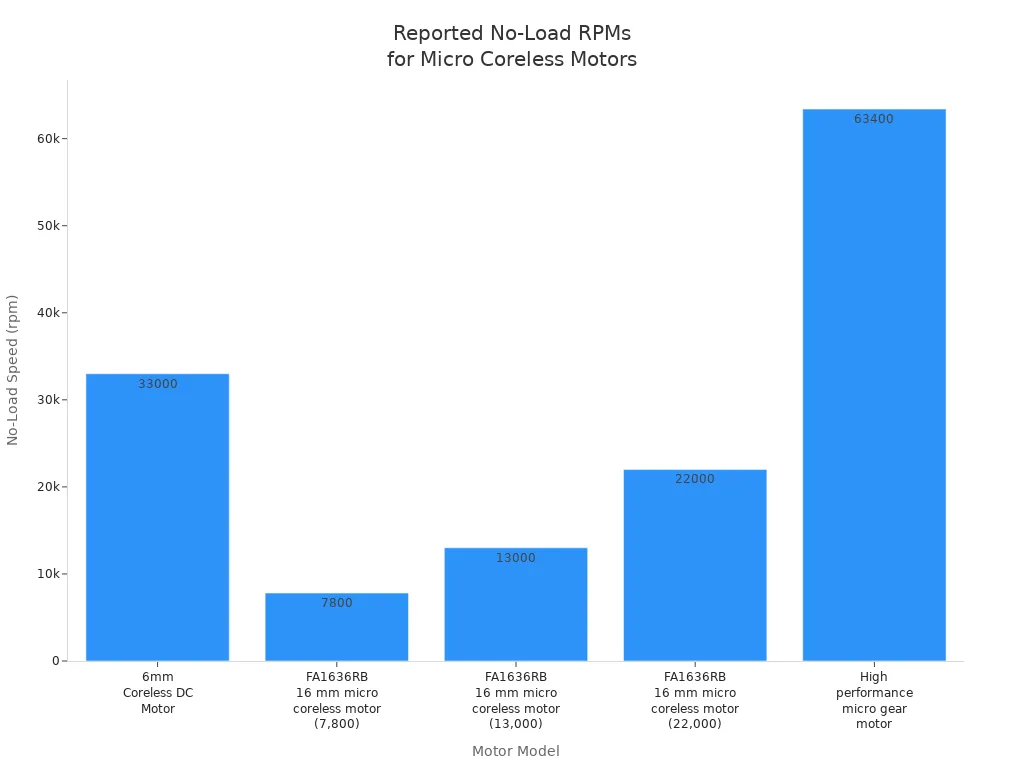
多くの場合、 マイクロコアレスモーターは、 3 ~ 4 ボルトで電力を供給すると、約 20,000 ~ 66,000 rpm の速度で回転します。 Rpm は 1 分あたりの回転数を表し、モーターのシャフトがどれだけ速く回転するかを示します。この速度は、デバイスが供給できる電力量に影響するため、重要です。たとえば、以下の表は、さまざまなモデルの実際の rpm 数値を示しています。
モデル |
無負荷回転数(rpm) |
6mmコアレスDCモーター |
33,000±10% |
FA1636RB 16mmマイクロコアレスモーター |
7,800、13,000、22,000、22,000 |
高性能マイクロギアモーター |
63,400 |
重要なポイント
マイクロコアレスモーターは通常、20,000 ~ 66,000 rpm で回転します。動作するには3〜4ボルトが必要です。モーターの正確な速度を知るには仕様を参照してください。
無負荷回転数は負荷回転数よりも高くなります。重量や抵抗を加えると、モーターの速度が低下します。プロジェクト用のモーターを選択するときは、常に負荷を考慮してください。
モーターにより多くの電圧を与えると、回転が速くなります。モーターを破損しないように、適切な電圧を使用してください。これにより、必要な速度を得ることができます。
タコメーターを使用してモーターの回転数を正確に確認してください。光センサーやアプリなどの DIY 方法を使用して速度をチェックすることもできます。
デバイスにとって適切な rpm を選択することは非常に重要です。ドローンや医療機器など、さまざまなものが最適に動作するには、一定の速度が必要です。
マイクロコアレスモーターの回転数範囲
一般的な RPM 値
を見ると、幅広いrpm値を見つけることができます。 マイクロコアレスモーター。ほとんどのモデルは、3 ~ 4 ボルトで駆動された場合、20,000 ~ 66,000 rpm で動作します。 RC ドローンまたは高速アプリケーション向けに設計された一部のモーターは、さらに高速に達します。以下にいくつかの例を示します。
RC ドローンで使用されるマイクロコアレスモーターは、24 ボルトで 566mA の連続電流で最大 10,230 rpm に達します。
多くの標準的なマイクロコアレスモーターは、無負荷条件下で 33,000 rpm 以上で回転します。
高性能モデルでは 50,000 rpm を超える速度が達成される場合があります。
モーターの仕様を常に確認する必要があります。メーカーは、抵抗なしでモーターがどれだけ速く回転するかを示す無負荷速度をリストしています。
無負荷時の RPM と負荷時の RPM
マイクロコアレスモーターを使用すると、無負荷回転数と負荷回転数の違いに気づくでしょう。無負荷回転数とは、モーターが何も減速せずに自由に回転することを意味します。負荷回転数は、プロペラ、ギア、または抵抗を生み出すその他のデバイスを取り付けると発生します。
負荷を加えると、モーターが抵抗に打ち勝つためにより激しく動作するため、回転数が低下します。逆起電力(逆起電力)が減少し、速度が低下します。電流とトルクが負荷と釣り合うまで、モーターは減速します。
期待できることは次のとおりです。
デバイスを特定の速度で実行したい場合は、無負荷時の rpm と負荷時の rpm の両方を考慮する必要があります。これは、プロジェクトに適切なマイクロコアレスモーターを選択するのに役立ちます。
RPMに影響を与える要因
電圧の影響
マイクロコアレスモーターに供給する電圧は、その速度に大きな影響を与えます。電圧を上げると回転数が上がります。電圧を下げると、モーターの回転が遅くなります。ほとんどのミニ DC モーターは 1.5 ~ 100 ボルトで最適に動作します。一般的な選択肢は 3V、6V、または 12V です。たとえば、3V バッテリーを使用すると、モーターは一定の速度で回転します。 6Vバッテリーに交換すると回転数が上がります。これは、電圧が高くなるとモーターに流れる電流が増え、モーターの回転が速くなるために起こります。
ヒント: モーターの推奨電圧を必ず確認してください。電圧が高すぎると損傷する可能性があり、低すぎると十分な速度が得られない可能性があります。
エフェクトをロードする
負荷とは、プロペラやギアなど、モーターが動かさなければならないものすべてです。負荷がかかると回転数が下がります。モーターは余分な重量を回転させるためにより激しく動作します。重い負荷を加えるとさらに速度が落ちます。たとえば、自由に回転するマイクロコアレスモーターは 33,000 rpm に達する可能性があります。小型ファンを取り付けると、回転数が 28,000 rpm まで低下する可能性があります。ファンが大きいと速度はさらに遅くなります。
負荷が大きい = 回転数が低い
負荷が少ない = 回転数が高い
プロジェクト用のモーターを選択するときは、常に負荷を考慮する必要があります。
モーターの設計
モーターの設計も回転数に影響します。マイクロコアレスモーターは軽量なコアレスコイルを使用しています。この設計により、次のような特別な機能が得られます。
強力な磁石、特殊な巻線タイプ、小型ローターを備えたモーターは、より高速に回転できます。コアレス設計により、騒音が少なく、速度曲線がよりスムーズになります。これらの利点は、スピードと制御が最も重要となるドローン、医療ツール、ロボット工学などのデバイスで実感できます。
回転数の測定
タコメーターの使用
タコメーターはモーターの回転速度を知るのに役立ちます。このツールは速度をすぐに表示し、非常に正確です。デジタルタコメーターの中には、動きを確認するためにレーザーを使用するものもあります。モーター上の輝くスポットにレーザーを向けます。画面には回転数が表示されます。これらのタコメーターは、10 ~ 99,999 rpm の速度を測定できます。約50mmから200mmの距離で動作します。モーターに触れる必要がないため、余分な抵抗がありません。
特徴 |
説明 |
タイプ |
非接触デジタルタコメーター |
回転数測定範囲 |
10.0 ~ 99,999 RPM |
測定方法 |
非侵入型、レーザーを使用 |
画面 |
LCD バックライト、RPM と回転数を表示 |
目標距離 |
50mm~200mm |
バッテリー寿命 |
12時間の連続動作 |
より正確な結果が必要な場合は、DC タコメーター ジェネレーターを使用できます。回転速度を電圧信号に変換するツールです。研究室やサーボシステムに適しています。
DIY 方法
自宅や教室でさまざまな方法で回転数を確認できます。光学センサーを使用して、回転シャフト上のマークを検出することもできます。カウンターと LED 番号を使用して RPM カウンターを構築できます。一部の電話アプリでは、カメラを使用して回転数を把握します。
ヒント: 光学センサーと電話アプリは高速で使いやすいです。特別な工具は必要なく、セットアップも簡単です。
速度を測定する安価な方法として、近接センサーを使用したり、逆起電力をチェックしたりすることもできます。速いクロックでカウントすると、低速でも良好な結果が得られます。
スペックから計算する
Kv 定格と使用する電圧を使用して rpm を推測できます。 Kv 定格は、各ボルトでモーターが何回回転するかを示します。簡単な式は次のとおりです:
RPM = Kv × 電圧
たとえば、モーターの Kv が 1000 で、10 ボルトを使用する場合、rpm は 10,000 になります。 2300Kv モーターと 14.8V バッテリーがある場合、rpm は約 34,040 になります。最良の答えを得るには、常にメーカーのデータを参照してください。こうすることで、マイクロコアレスモーターの電源を入れる前に速度を知ることができます。
RPM が重要な理由
パフォーマンス
RPM はモーターがどの程度うまく機能するかにとって重要です。マイクロコアレスモーターを使用する場合、高速かつスムーズな動作が必要です。回転数が高くなると、モーターが素早く反応します。これは、ロボットや小型ガジェットなど、速度と正確性が必要なものに適しています。以下の表は、rpm によってパフォーマンスがどのように変化するかを示しています。
仕様 |
価値 |
定格電圧 |
3.0V |
定格速度 |
14,000±2,500rpm |
寸法 |
11.9mm×4.6mm×4.9mm |
アプリケーションの適合性 |
ロボット工学と小型電子機器 |
パフォーマンスへの影響 |
RPM が高くなると、作動と応答性が速くなり、正確さと素早い動きに不可欠です。 |
これらのモーターで得られるのはスピードだけではありません。マイクロコアレスモーターは起動と停止が迅速です。小さいサイズでも強力なパワーを発揮します。スムーズに動くのでコントロールも簡単です。これらのモーターは熱処理にも優れているため、寿命が長くなります。
特徴 |
説明 |
回転速度 |
入力パルスが増えると上昇します。速度が遅いと問題が発生する可能性があります。 |
負荷トルクの影響 |
負荷が大きいとモーターの回転が遅くなります。 |
電圧印加 |
電圧が高くなると、モーターの回転が速くなります。 |
注: rpm が高いと、トルクが減少し、電力使用量が増加する可能性があります。スピードと強度および効率のバランスをとる必要があります。
パフォーマンスファクター |
説明 |
高回転数 |
コアレスモーターは非常に高速に動作しますが、損傷を避けるために慎重に使用する必要があります。 |
トルク |
回転数が上がるとトルクが低下する場合があります。 |
消費電力 |
速度が速いほど多くの電力が使用されるため、効率が低下する可能性があります。 |
アプリケーションの適合性
プロジェクトに適切な rpm を選択する必要があります。デバイスが異なれば、必要な速度も異なります。ドローンが高速回転して離陸するには、高い回転数が必要です。医療機器には、静かで安定したモーターが必要です。おもちゃには安全で速すぎないモーターが必要です。以下の表は、rpm が各用途にどのように適合するかを示しています。
応用 |
回転数範囲 |
主な特長 |
ドローン |
最大30,000 |
高いパワーウェイトレシオ、軽量、高効率により長時間の飛行を可能にします。 |
医療機器 |
異なります |
低ノイズ、正確な制御、重要なタスクの信頼性。 |
おもちゃ |
最大33,000 |
コンパクトなサイズで、リモコンや模型の効率的な操作が可能です。 |
ドローン: 回転数が高いと、機体を持ち上げて高速に移動できます。
医療機器: 回転数が低いと静かで安定した状態になります。
おもちゃ: 中程度の回転数で楽しく安全に遊べます。
プロジェクトに必要な rpm を常に確認してください。適切な速度を選択すると、デバイスが正常に動作し、より長く使用できるようになります。
マイクロコアレスモーターは 20,000 ~ 66,000 rpm で回転することを学びました。速度は電圧、負荷、モーターの構造によって異なります。定格回転数を見つけるには、必ずデータシートを参照してください。プロジェクトの速度も測定する必要があります。以下の表に主要なポイントを示します。
重要な側面 |
詳細 |
回転数範囲 |
通常 20,000 ~ 66,000 rpm |
影響を与える要因 |
電圧、負荷、モーターの設計 |
測定 |
タコメーター、DIY、または計算 |
アプリケーションの適合性 |
ドローン、医療、ロボット工学、玩具 |
rpm がプロジェクトの必要なものと一致していることを確認してください。適切な kv を選択し、仕様を確認することで、モーターの問題を防ぐことができます。
よくある質問
マイクロモーターにおける「コアレス」とは何を意味しますか?
コアレスモーターは鉄心を使わずにコイルを使用します。レスポンスが速くなり、重量も軽減されます。この設計により、モーターが迅速かつスムーズに回転します。
マイクロコアレスモーターの回転数を制御できますか?
はい、電圧を変更するかモーターコントローラーを使用することで回転数を制御できます。電圧が低いとモーターが遅くなります。電圧が高いほど回転が速くなります。
負荷をかけると回転数が下がるのはなぜですか?
負荷を加えると、モーターはさらに激しく動作します。余分な重量を回転させるためにモーターがより多くの電力を必要とするため、速度が低下します。負荷が重いほど、回転数が低くなります。
モーターの回転が速すぎるかどうかはどうすればわかりますか?
余分な熱、騒音、振動が発生する場合があります。モーターの寿命が短くなる可能性があります。モーターを安全に保つために、メーカーの回転数制限を常に確認してください。
電圧を使いすぎるとどうなりますか?
電圧が高すぎるとモーターが過熱する可能性があります。巻線を損傷したり、モーターの寿命を縮める可能性があります。安全に動作させるために、常に推奨電圧を使用してください。