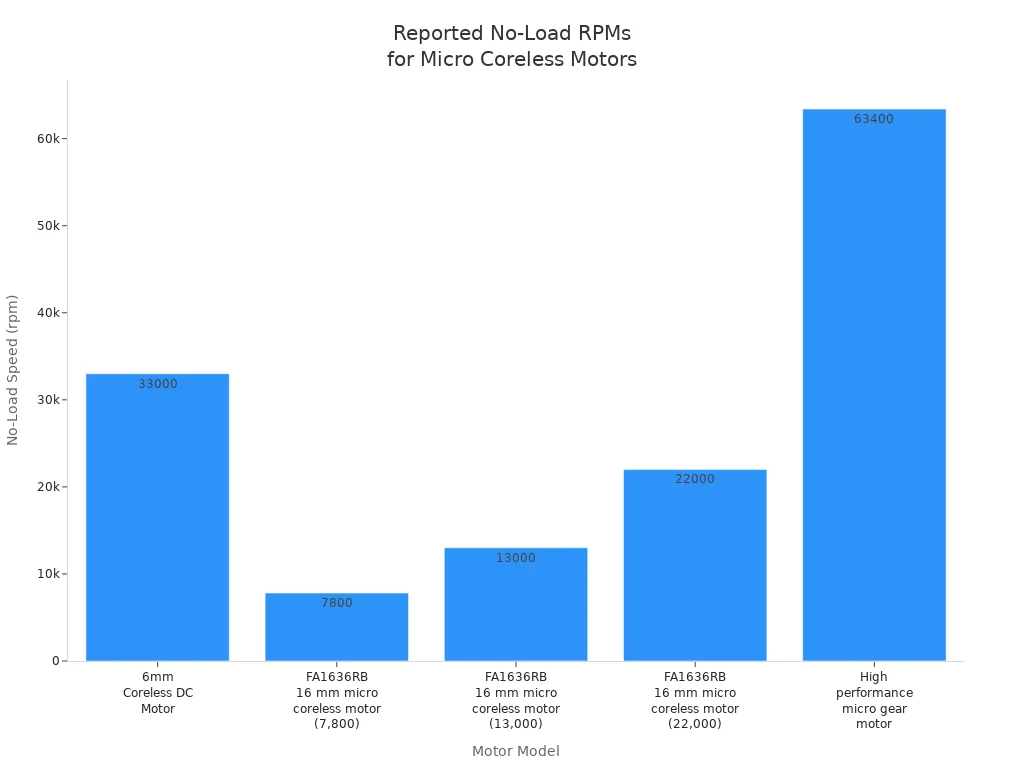
آپ کو اکثر معلوم ہوتا ہے کہ a مائیکرو کور لیس موٹر تقریباً 20,000 سے 66,000 rpm کی رفتار سے گھومتی ہے جب 3 سے 4 وولٹ کی طاقت ہوتی ہے۔ Rpm کا مطلب انقلابات فی منٹ ہے، جو آپ کو بتاتا ہے کہ موٹر کا شافٹ کتنی تیزی سے مڑتا ہے۔ یہ رفتار اہمیت رکھتی ہے کیونکہ اس سے اثر پڑتا ہے کہ آپ کا آلہ کتنی طاقت فراہم کر سکتا ہے۔ مثال کے طور پر، نیچے دی گئی جدول مختلف ماڈلز کے لیے حقیقی دنیا کے rpm نمبرز دکھاتی ہے۔
ماڈل |
بغیر لوڈ کی رفتار (rpm) |
6 ملی میٹر کور لیس ڈی سی موٹر |
33,000 ± 10% |
FA1636RB 16 ملی میٹر مائیکرو کور لیس موٹر |
7,800, 13,000, 22,000, 22,000 |
اعلی کارکردگی مائیکرو گیئر موٹر |
63,400 |
کلیدی ٹیک ویز
مائیکرو کور لیس موٹرز عام طور پر 20,000 سے 66,000 rpm تک گھومتی ہیں۔ انہیں کام کرنے کے لیے 3 سے 4 وولٹ کی ضرورت ہوتی ہے۔ اپنی موٹر کی درست رفتار جاننے کے لیے وضاحتیں دیکھیں۔
نو لوڈ شدہ آر پی ایم لوڈ شدہ آر پی ایم سے زیادہ ہے۔ اگر آپ وزن یا مزاحمت شامل کرتے ہیں، تو موٹر سست ہو جاتی ہے. اپنے پروجیکٹ کے لیے موٹر چنتے وقت ہمیشہ بوجھ کے بارے میں سوچیں۔
موٹر کو زیادہ وولٹیج دینے سے یہ تیزی سے گھومتی ہے۔ صحیح وولٹیج کا استعمال کریں تاکہ آپ موٹر کو نہ توڑیں۔ اس سے آپ کو مطلوبہ رفتار حاصل کرنے میں مدد ملتی ہے۔
موٹر کے آر پی ایم کو درست طریقے سے چیک کرنے کے لیے ٹیکو میٹر کا استعمال کریں۔ آپ رفتار کو چیک کرنے کے لیے آپٹیکل سینسرز یا ایپس جیسے DIY طریقے بھی استعمال کر سکتے ہیں۔
صحیح rpm کا انتخاب آپ کے آلے کے لیے بہت اہم ہے۔ مختلف چیزیں، جیسے ڈرون یا طبی آلات، کو بہترین کام کرنے کے لیے مخصوص رفتار کی ضرورت ہوتی ہے۔
مائیکرو کور لیس موٹر RPM رینج
عام RPM قدریں۔
جب آپ دیکھتے ہیں تو آپ rpm کی قدروں کی ایک وسیع رینج تلاش کر سکتے ہیں۔ مائیکرو کور لیس موٹرز زیادہ تر ماڈلز 20,000 اور 66,000 rpm کے درمیان چلتے ہیں جب 3 سے 4 وولٹ کی طاقت ہوتی ہے۔ RC ڈرونز یا تیز رفتار ایپلی کیشنز کے لیے ڈیزائن کی گئی کچھ موٹریں اس سے بھی زیادہ رفتار تک پہنچتی ہیں۔ یہاں کچھ مثالیں ہیں:
RC ڈرون میں استعمال ہونے والی مائکرو کور لیس موٹر 566mA کے مسلسل کرنٹ کے ساتھ 24 وولٹ پر 10,230 rpm تک پہنچ سکتی ہے۔
بہت سی معیاری مائیکرو کور لیس موٹرز بغیر بوجھ کے حالات میں 33,000 rpm یا اس سے زیادہ پر گھومتی ہیں۔
اعلی کارکردگی والے ماڈلز 50,000 rpm سے زیادہ رفتار حاصل کر سکتے ہیں۔
آپ کو ہمیشہ اپنی موٹر کی وضاحتیں چیک کرنی چاہئیں۔ مینوفیکچررز بغیر لوڈ کی رفتار کی فہرست بناتے ہیں، جو دکھاتا ہے کہ موٹر بغیر کسی مزاحمت کے کتنی تیزی سے گھومتی ہے۔
نو لوڈ بمقابلہ لوڈ شدہ RPM
جب آپ مائیکرو کور لیس موٹر استعمال کرتے ہیں، تو آپ کو بغیر لوڈ rpm اور لوڈ شدہ rpm کے درمیان فرق نظر آئے گا۔ بغیر لوڈ والے آر پی ایم کا مطلب ہے کہ موٹر آزادانہ طور پر گھومتی ہے، جس میں کوئی چیز اسے سست نہیں کرتی ہے۔ بھری ہوئی آر پی ایم اس وقت ہوتی ہے جب آپ پروپیلر، گیئر، یا دوسرا آلہ منسلک کرتے ہیں جو مزاحمت پیدا کرتا ہے۔
جب آپ بوجھ ڈالتے ہیں تو rpm گر جاتا ہے کیونکہ موٹر مزاحمت پر قابو پانے کے لیے زیادہ محنت کرتی ہے۔ پیچھے والا EMF (الیکٹرو موٹیو فورس) کم ہو جاتا ہے، جو رفتار کو کم کرتا ہے۔ موٹر اس وقت تک سست ہوجاتی ہے جب تک کہ لوڈ کے ساتھ کرنٹ اور ٹارک بیلنس نہ ہوجائے۔
یہاں وہ ہے جس کی آپ توقع کر سکتے ہیں:
No-load rpm ہمیشہ بھری ہوئی rpm سے زیادہ ہوتی ہے۔
جب آپ بوجھ بڑھاتے ہیں تو رفتار کم ہوتی جاتی ہے۔
درست کمی کا انحصار بوجھ کے سائز اور موٹر کے ڈیزائن پر ہوتا ہے۔
اگر آپ چاہتے ہیں کہ آپ کا آلہ ایک خاص رفتار سے چلے، تو آپ کو بغیر لوڈ اور لوڈ شدہ rpm دونوں پر غور کرنے کی ضرورت ہے۔ اس سے آپ کو اپنے پروجیکٹ کے لیے صحیح مائیکرو کور لیس موٹر کا انتخاب کرنے میں مدد ملتی ہے۔
RPM کو متاثر کرنے والے عوامل
وولٹیج کا اثر
مائیکرو کور لیس موٹر کو آپ جو وولٹیج فراہم کرتے ہیں اس کا اس کی رفتار پر بڑا اثر پڑتا ہے۔ جب آپ وولٹیج بڑھاتے ہیں تو آر پی ایم اوپر جاتا ہے۔ اگر آپ وولٹیج کو کم کرتے ہیں، تو موٹر سست گھومتی ہے۔ زیادہ تر منی ڈی سی موٹرز 1.5 اور 100 وولٹ کے درمیان بہترین کام کرتی ہیں۔ عام انتخاب 3V، 6V، یا 12V ہیں۔ مثال کے طور پر، اگر آپ 3V بیٹری استعمال کرتے ہیں، تو موٹر ایک خاص رفتار سے گھومے گی۔ اگر آپ 6V بیٹری پر سوئچ کرتے ہیں، تو rpm بڑھ جائے گا۔ ایسا اس لیے ہوتا ہے کیونکہ زیادہ وولٹیج موٹر کے ذریعے زیادہ کرنٹ کو دھکیلتا ہے، جس سے یہ تیز تر ہو جاتی ہے۔
مشورہ: ہمیشہ اپنی موٹر کے لیے تجویز کردہ وولٹیج چیک کریں۔ بہت زیادہ وولٹیج اسے نقصان پہنچا سکتا ہے، جبکہ بہت کم رفتار کافی نہیں دے سکتا۔
لوڈ اثرات
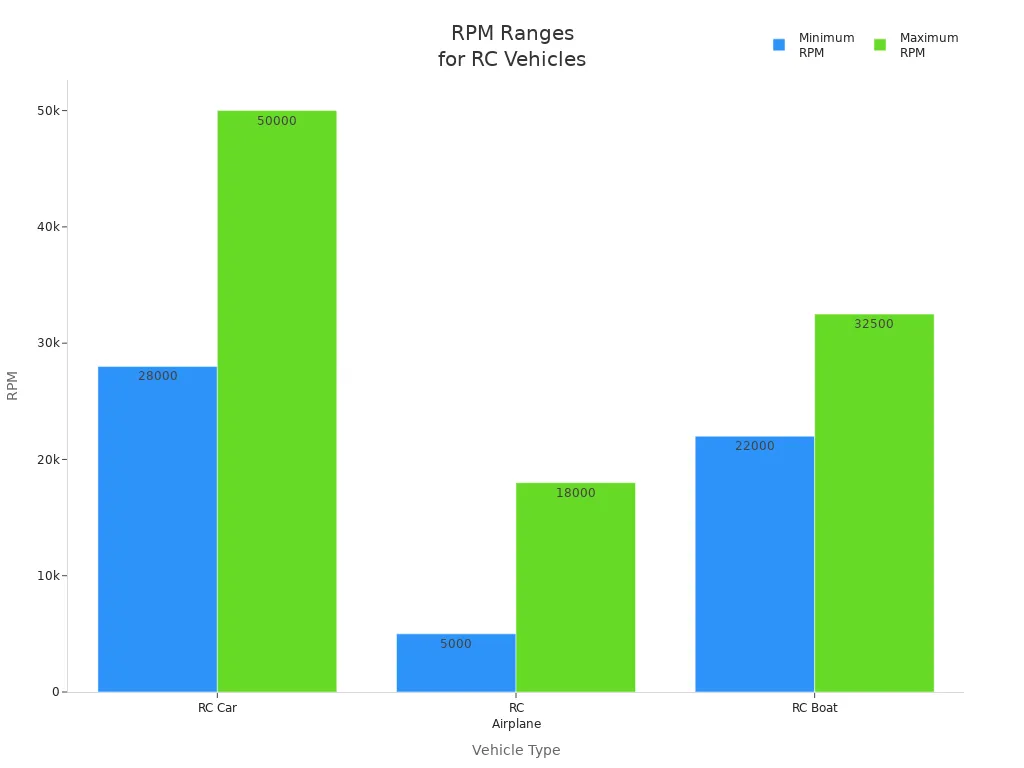
بوجھ وہ چیز ہوتی ہے جسے موٹر کو حرکت میں لانا ہوتا ہے، جیسے پروپیلر یا گیئر۔ جب آپ بوجھ ڈالتے ہیں تو rpm گر جاتا ہے۔ موٹر اضافی وزن کو موڑنے کے لیے زیادہ محنت کرتی ہے۔ اگر آپ بھاری بوجھ ڈالتے ہیں تو رفتار اور بھی کم ہوجاتی ہے۔ مثال کے طور پر، آزادانہ طور پر گھومنے والی مائیکرو کور لیس موٹر 33,000 rpm تک پہنچ سکتی ہے۔ اگر آپ ایک چھوٹا پنکھا لگاتے ہیں تو رفتار 28,000 rpm تک گر سکتی ہے۔ ایک بڑا پرستار اسے مزید سست کر دے گا۔
جب آپ اپنے پروجیکٹ کے لیے موٹر چنتے ہیں تو آپ کو ہمیشہ بوجھ کے بارے میں سوچنا چاہیے۔
موٹر ڈیزائن
موٹر کا ڈیزائن اس کے آر پی ایم کو بھی متاثر کرتا ہے۔ ایک مائیکرو کور لیس موٹر ہلکا پھلکا، کور لیس کوائل استعمال کرتی ہے۔ یہ ڈیزائن اسے کچھ خاص خصوصیات دیتا ہے:
ہلکے وزن کی تعمیر کی وجہ سے فوری سرعت اور اعلی کارکردگی
کم جڑتا، جس کا مطلب ہے کہ موٹر رفتار میں ہونے والی تبدیلیوں کا تیزی سے جواب دیتی ہے۔
ہموار اور مستحکم آپریشن، کم کوگنگ ٹارک کی بدولت
چھوٹے سائز میں ہائی پاور آؤٹ پٹ، جو تنگ جگہوں میں مدد کرتا ہے۔
مضبوط میگنےٹ، خاص سمیٹنے والی قسموں اور چھوٹے گھومنے والی موٹریں تیزی سے گھوم سکتی ہیں۔ کور لیس ڈیزائن کا مطلب بھی کم شور اور ایک ہموار رفتار وکر ہے۔ آپ یہ فوائد ڈرون، طبی آلات اور روبوٹکس جیسے آلات میں دیکھیں گے، جہاں رفتار اور کنٹرول سب سے زیادہ اہمیت رکھتا ہے۔
RPM کی پیمائش
ٹیکو میٹر کا استعمال
ایک ٹیکومیٹر آپ کو یہ جاننے میں مدد کرتا ہے کہ موٹر کتنی تیزی سے گھومتی ہے۔ یہ ٹول فوراً رفتار دکھاتا ہے اور بہت درست ہے۔ کچھ ڈیجیٹل ٹیکو میٹر حرکت کو چیک کرنے کے لیے لیزر کا استعمال کرتے ہیں۔ آپ لیزر کو موٹر پر ایک چمکدار جگہ پر اشارہ کرتے ہیں۔ اسکرین پھر آر پی ایم نمبر دکھاتی ہے۔ یہ ٹیکو میٹر 10 سے 99,999 rpm کی رفتار کی پیمائش کر سکتے ہیں۔ وہ تقریبا 50 ملی میٹر سے 200 ملی میٹر کے فاصلے پر کام کرتے ہیں۔ آپ کو موٹر کو چھونے کی ضرورت نہیں ہے، لہذا کوئی اضافی ڈریگ نہیں ہے۔
فیچر |
تفصیل |
قسم |
غیر رابطہ ڈیجیٹل ٹیکومیٹر |
RPM پیمائش کی حد |
10.0 سے 99,999 RPM |
پیمائش کا طریقہ |
لیزر کا استعمال کرتے ہوئے، غیر مداخلت |
ڈسپلے |
LCD بیک لائٹ، RPM اور انقلاب کی گنتی دکھاتا ہے۔ |
ہدف کا فاصلہ |
50 ملی میٹر سے 200 ملی میٹر |
بیٹری کی زندگی |
12 گھنٹے تک مسلسل آپریشن |
اگر آپ کو مزید درست نتائج کی ضرورت ہے، تو آپ ڈی سی ٹیکو میٹر جنریٹر استعمال کر سکتے ہیں۔ یہ ٹول گھومنے کی رفتار کو وولٹیج سگنل میں بدل دیتا ہے۔ یہ لیبز اور سروو سسٹم کے لیے اچھا ہے۔
DIY طریقے
آپ گھر پر یا کلاس میں rpm کو کئی طریقوں سے چیک کر سکتے ہیں۔ آپ اسپننگ شافٹ پر نشانات کو دیکھنے کے لیے آپٹیکل سینسر استعمال کر سکتے ہیں۔ آپ کاؤنٹرز اور ایل ای ڈی نمبروں کے ساتھ ایک RPM کاؤنٹر بنا سکتے ہیں۔ کچھ فون ایپس rpm کا پتہ لگانے کے لیے آپ کا کیمرہ استعمال کرتی ہیں۔
مشورہ: آپٹیکل سینسرز اور فون ایپس تیز اور استعمال میں آسان ہیں۔ آپ کو خصوصی ٹولز کی ضرورت نہیں ہے، اور سیٹ اپ آسان ہے۔
آپ قربت کا سینسر بھی استعمال کر سکتے ہیں یا رفتار کی پیمائش کرنے کے سستے طریقے کے لیے بیک EMF چیک کر سکتے ہیں۔ تیز رفتار گھڑی کے ساتھ گننے سے آپ کو اچھے نتائج حاصل کرنے میں مدد ملتی ہے، یہاں تک کہ سست رفتار پر بھی۔
چشمی سے حساب لگانا
آپ Kv کی درجہ بندی اور آپ کے استعمال کردہ وولٹیج کا استعمال کرتے ہوئے rpm کا اندازہ لگا سکتے ہیں۔ Kv کی درجہ بندی آپ کو بتاتی ہے کہ ہر وولٹ کے لیے موٹر کتنی بار گھومتی ہے۔ یہاں ایک سادہ فارمولا ہے:
RPM = Kv × وولٹیج
مثال کے طور پر، اگر آپ کی موٹر کا Kv 1000 ہے اور آپ 10 وولٹ استعمال کرتے ہیں، تو rpm 10,000 ہے۔ اگر آپ کے پاس 2300Kv موٹر اور 14.8V بیٹری ہے، تو rpm تقریباً 34,040 ہے۔ بہترین جواب کے لیے ہمیشہ میکر کے ڈیٹا کو دیکھیں۔ اس طرح، آپ اپنی مائیکرو کور لیس موٹر کو آن کرنے سے پہلے رفتار جان سکتے ہیں۔
RPM کیوں اہمیت رکھتا ہے۔
کارکردگی
آپ کی موٹر کتنی اچھی طرح سے کام کرتی ہے اس کے لیے RPM اہم ہے۔ اگر آپ مائیکرو کور لیس موٹر استعمال کرتے ہیں، تو آپ چاہتے ہیں کہ یہ تیز اور ہموار ہو۔ زیادہ آر پی ایم موٹر کو تیزی سے رد عمل ظاہر کرنے دیتا ہے۔ یہ ان چیزوں کے لیے اچھا ہے جن کو رفتار اور درستگی کی ضرورت ہوتی ہے، جیسے روبوٹ یا چھوٹے گیجٹس۔ نیچے دی گئی جدول دکھاتی ہے کہ کس طرح rpm کارکردگی کو تبدیل کرتا ہے۔
تفصیلات |
قدر |
شرح شدہ وولٹیج |
3.0V |
شرح شدہ رفتار |
14,000 ± 2,500 rpm |
طول و عرض |
11.9mm x 4.6mm x 4.9mm |
درخواست کی مناسبیت |
روبوٹکس اور چھوٹے الیکٹرانک آلات |
کارکردگی پر اثر |
اعلی RPM تیز عمل اور ردعمل کا باعث بنتا ہے، جو درستگی اور تیز رفتار حرکت کے لیے اہم ہے۔ |
آپ ان موٹروں کے ساتھ صرف رفتار سے زیادہ حاصل کرتے ہیں۔ مائیکرو کور لیس موٹرز تیزی سے شروع اور رک جاتی ہیں۔ وہ چھوٹے سائز میں مضبوط طاقت دیتے ہیں۔ وہ آسانی سے چلتے ہیں، لہذا آپ انہیں آسانی سے کنٹرول کر سکتے ہیں۔ یہ موٹریں گرمی کو بھی اچھی طرح سے ہینڈل کرتی ہیں، جو انہیں زیادہ دیر تک چلنے میں مدد دیتی ہیں۔
فیچر |
وضاحت |
گردش کی رفتار |
زیادہ ان پٹ دالوں کے ساتھ اوپر جاتا ہے۔ سست رفتار مسائل پیدا کر سکتا ہے. |
لوڈ ٹارک اثر |
بھاری بوجھ موٹر کی اسپن کو سست بناتا ہے۔ |
وولٹیج کی درخواست |
زیادہ وولٹیج موٹر کو تیز رفتار بناتا ہے۔ |
نوٹ: ہائی آر پی ایم کا مطلب کم ٹارک اور زیادہ پاور استعمال ہو سکتا ہے۔ آپ کو طاقت اور کارکردگی کے ساتھ رفتار کو متوازن کرنے کی ضرورت ہے۔
کارکردگی کا عنصر |
تفصیل |
ہائی آر پی ایم |
کور لیس موٹرز بہت تیزی سے چل سکتی ہیں لیکن نقصان سے بچنے کے لیے احتیاط سے استعمال کی ضرورت ہے۔ |
ٹارک |
اگر rpm اوپر جاتا ہے تو ٹارک نیچے جا سکتا ہے۔ |
بجلی کی کھپت |
تیز رفتار زیادہ طاقت کا استعمال کرتی ہے، جو کارکردگی کو کم کر سکتی ہے۔ |
ایپلی کیشن فٹ
آپ کو اپنے پروجیکٹ کے لیے صحیح rpm چننے کی ضرورت ہے۔ مختلف آلات کو مختلف رفتار کی ضرورت ہوتی ہے۔ ڈرونز کو تیزی سے گھومنے اور اٹھانے کے لیے ہائی آر پی ایم کی ضرورت ہوتی ہے۔ طبی آلات کو ایسی موٹروں کی ضرورت ہوتی ہے جو خاموش اور مستحکم ہوں۔ کھلونوں کو موٹروں کی ضرورت ہوتی ہے جو محفوظ ہوں اور زیادہ تیز نہ ہوں۔ نیچے دی گئی جدول سے پتہ چلتا ہے کہ کس طرح rpm ہر استعمال میں فٹ بیٹھتا ہے:
درخواست |
RPM رینج |
کلیدی خصوصیات |
ڈرونز |
30,000 تک |
اعلی طاقت سے وزن کا تناسب، ہلکا پھلکا، توسیعی پرواز کے لیے اعلی کارکردگی۔ |
طبی آلات |
مختلف ہوتی ہے۔ |
کم شور، عین مطابق کنٹرول، اہم کاموں کے لیے قابل اعتماد۔ |
کھلونے |
33,000 تک |
کمپیکٹ سائز، ریموٹ کنٹرول اور ماڈلز کے لیے موثر آپریشن۔ |
ڈرون: ہائی آر پی ایم انہیں اٹھانے اور تیزی سے حرکت کرنے میں مدد کرتا ہے۔
طبی آلات: کم آر پی ایم انہیں خاموش اور مستحکم رکھتا ہے۔
کھلونے: درمیانہ rpm انہیں تفریح اور محفوظ بناتا ہے۔
ہمیشہ چیک کریں کہ آپ کے پروجیکٹ کو کس آر پی ایم کی ضرورت ہے۔ صحیح رفتار کا انتخاب آپ کے آلے کو اچھی طرح سے کام کرنے اور زیادہ دیر تک چلنے میں مدد کرتا ہے۔
آپ نے سیکھا ہے کہ مائکرو کور لیس موٹرز 20,000 سے 66,000 rpm تک گھومتی ہیں۔ رفتار وولٹیج، لوڈ، اور موٹر کی تعمیر پر منحصر ہے۔ ریٹیڈ آر پی ایم تلاش کرنے کے لیے ہمیشہ ڈیٹا شیٹ کو دیکھیں۔ آپ کو اپنے پروجیکٹ کی رفتار کی پیمائش بھی کرنی چاہیے۔ نیچے دی گئی جدول اہم نکات کو ظاہر کرتی ہے:
کلیدی پہلو |
تفصیلات |
RPM رینج |
20,000–66,000 rpm عام |
متاثر کرنے والے عوامل |
وولٹیج، لوڈ، موٹر ڈیزائن |
پیمائش |
ٹیکو میٹر، DIY، یا حساب کتاب |
ایپلی کیشن فٹ |
ڈرون، میڈیکل، روبوٹکس، کھلونے |
یقینی بنائیں کہ آر پی ایم آپ کے پروجیکٹ کی ضرورت سے میل کھاتا ہے۔ صحیح kv کا انتخاب کرنا اور چشموں کی جانچ کرنا موٹر کے مسائل کو روک سکتا ہے۔
اکثر پوچھے گئے سوالات
مائیکرو موٹر میں 'کورلیس' کا کیا مطلب ہے؟
کور لیس موٹر آئرن کور کے بغیر کوائل استعمال کرتی ہے۔ آپ کو تیز ردعمل اور کم وزن ملتا ہے۔ یہ ڈیزائن موٹر کو جلدی اور آسانی سے گھومنے میں مدد کرتا ہے۔
کیا آپ مائکرو کور لیس موٹر کے آر پی ایم کو کنٹرول کر سکتے ہیں؟
جی ہاں، آپ وولٹیج کو تبدیل کرکے یا موٹر کنٹرولر کا استعمال کرکے rpm کو کنٹرول کرسکتے ہیں۔ کم وولٹیج موٹر کو سست کرتا ہے۔ زیادہ وولٹیج اسے تیزی سے گھومتا ہے۔
جب آپ بوجھ ڈالتے ہیں تو آر پی ایم کیوں گرتا ہے؟
جب آپ بوجھ ڈالتے ہیں، تو موٹر زیادہ محنت کرتی ہے۔ رفتار کم ہوتی ہے کیونکہ موٹر کو اضافی وزن کو موڑنے کے لیے زیادہ طاقت کی ضرورت ہوتی ہے۔ آپ کو بھاری بوجھ کے ساتھ کم آر پی ایم نظر آتا ہے۔
آپ کو کیسے پتہ چلے گا کہ آپ کی موٹر بہت تیزی سے گھوم رہی ہے؟
آپ اضافی گرمی، شور، یا کمپن محسوس کر سکتے ہیں. ہو سکتا ہے کہ موٹر زیادہ دیر تک نہ چل سکے۔ اپنی موٹر کو محفوظ رکھنے کے لیے ہمیشہ مینوفیکچرر کی rpm کی حد کو چیک کریں۔
اگر آپ بہت زیادہ وولٹیج استعمال کرتے ہیں تو کیا ہوتا ہے؟
بہت زیادہ وولٹیج موٹر کو زیادہ گرم کر سکتا ہے۔ آپ ونڈنگ کو نقصان پہنچا سکتے ہیں یا موٹر کی زندگی کو کم کر سکتے ہیں۔ محفوظ آپریشن کے لیے ہمیشہ تجویز کردہ وولٹیج کا استعمال کریں۔