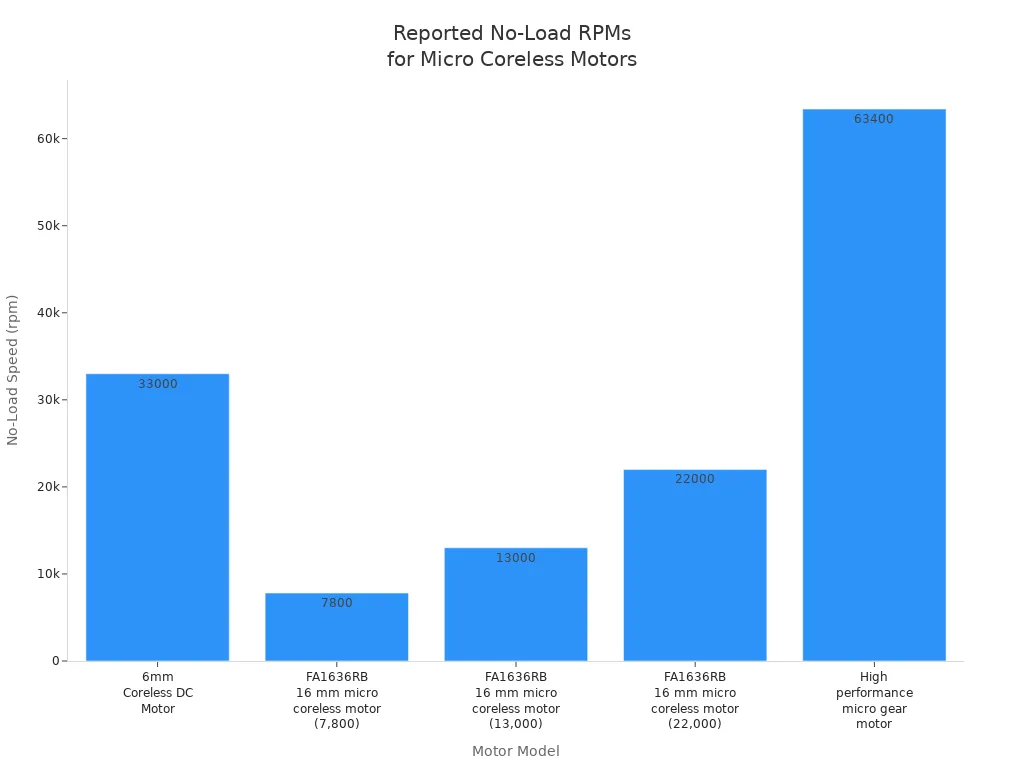
Anda sering mendapati bahawa a motor tanpa teras mikro berputar pada kelajuan dari kira-kira 20,000 hingga 66,000 rpm apabila dikuasakan oleh 3 hingga 4 volt. Rpm bermaksud pusingan seminit, yang memberitahu anda berapa laju aci motor berputar. Kelajuan ini penting kerana ia mempengaruhi jumlah kuasa yang boleh dihantar oleh peranti anda. Sebagai contoh, jadual di bawah menunjukkan nombor rpm dunia sebenar untuk model yang berbeza.
Model |
Kelajuan Tanpa Beban (rpm) |
Motor DC Tanpa Teras 6mm |
33,000 ± 10% |
FA1636RB 16 mm motor tanpa teras mikro |
7,800, 13,000, 22,000, 22,000 |
Motor gear mikro prestasi tinggi |
63,400 |
Pengambilan Utama
Motor tanpa teras mikro biasanya berputar dari 20,000 hingga 66,000 rpm. Mereka memerlukan 3 hingga 4 volt untuk berfungsi. Lihat spesifikasi untuk mengetahui kelajuan sebenar motor anda.
Rpm tanpa beban lebih tinggi daripada rpm yang dimuatkan. Jika anda menambah berat atau rintangan, motor menjadi perlahan. Sentiasa fikirkan tentang beban semasa memilih motor untuk projek anda.
Memberikan motor lebih voltan menjadikannya berputar lebih cepat. Gunakan voltan yang betul supaya anda tidak memecahkan motor. Ini membantu anda mendapatkan kelajuan yang anda inginkan.
Gunakan takometer untuk memeriksa rpm motor dengan tepat. Anda juga boleh menggunakan cara DIY seperti penderia optik atau apl untuk menyemak kelajuan.
Memilih rpm yang betul adalah sangat penting untuk peranti anda. Perkara yang berbeza, seperti dron atau peranti perubatan, memerlukan kelajuan tertentu untuk berfungsi dengan baik.
Julat RPM Motor Tanpa Teras Mikro
Nilai RPM Biasa
Anda boleh menemui pelbagai nilai rpm apabila anda melihatnya motor tanpa teras mikro . Kebanyakan model berjalan antara 20,000 dan 66,000 rpm apabila dikuasakan oleh 3 hingga 4 volt. Sesetengah motor yang direka untuk dron RC atau aplikasi berkelajuan tinggi mencapai kelajuan yang lebih tinggi. Berikut adalah beberapa contoh:
Motor tanpa teras mikro yang digunakan dalam dron RC boleh mencapai sehingga 10,230 rpm pada 24 volt dengan arus berterusan 566mA.
Banyak motor tanpa teras mikro standard berputar pada 33,000 rpm atau lebih dalam keadaan tanpa beban.
Model berprestasi tinggi boleh mencapai kelajuan melebihi 50,000 rpm.
Anda harus sentiasa menyemak spesifikasi untuk motor anda. Pengilang menyenaraikan kelajuan tanpa beban, yang menunjukkan betapa pantas motor berputar tanpa sebarang rintangan.
Tiada Beban lwn. Dimuat RPM
Apabila anda menggunakan motor tanpa teras mikro, anda akan melihat perbezaan antara rpm tanpa beban dan rpm dimuatkan. Rpm tanpa beban bermakna motor berputar dengan bebas, tanpa apa-apa yang memperlahankannya. Rpm dimuatkan berlaku apabila anda memasang kipas, gear atau peranti lain yang menghasilkan rintangan.
Rpm menurun apabila anda menambah beban kerana motor bekerja lebih keras untuk mengatasi rintangan. EMF belakang (daya gerak elektrik) berkurangan, yang menurunkan kelajuan. Motor menjadi perlahan sehingga arus dan tork mengimbangi dengan beban.
Inilah yang anda boleh jangkakan:
Rpm tanpa beban sentiasa lebih tinggi daripada rpm yang dimuatkan.
Kelajuan menurun apabila anda meningkatkan beban.
Penurunan tepat bergantung pada saiz beban dan reka bentuk motor.
Jika anda mahu peranti anda berjalan pada kelajuan tertentu, anda perlu mempertimbangkan kedua-dua rpm tanpa beban dan dimuatkan. Ini membantu anda memilih motor tanpa teras mikro yang sesuai untuk projek anda.
Faktor yang Mempengaruhi RPM
Kesan Voltan
Voltan yang anda bekalkan kepada motor tanpa teras mikro mempunyai kesan besar pada kelajuannya. Apabila anda meningkatkan voltan, rpm naik. Jika anda menurunkan voltan, motor berputar lebih perlahan. Kebanyakan motor DC mini berfungsi paling baik antara 1.5 dan 100 volt. Pilihan biasa ialah 3V, 6V atau 12V. Contohnya, jika anda menggunakan bateri 3V, motor akan berputar pada kelajuan tertentu. Jika anda bertukar kepada bateri 6V, rpm akan meningkat. Ini berlaku kerana lebih banyak voltan menolak lebih banyak arus melalui motor, menjadikannya lebih pantas.
Petua: Sentiasa semak voltan yang disyorkan untuk motor anda. Terlalu banyak voltan boleh merosakkannya, manakala terlalu sedikit mungkin tidak memberikan kelajuan yang mencukupi.
Kesan Muatan
Beban ialah apa sahaja yang perlu digerakkan oleh motor, seperti kipas atau gear. Apabila anda menambah beban, rpm menurun. Motor bekerja lebih keras untuk memusingkan berat tambahan. Jika anda menambah beban yang berat, kelajuannya akan semakin berkurangan. Contohnya, motor tanpa teras mikro berputar bebas mungkin mencapai 33,000 rpm. Jika anda memasang kipas kecil, kelajuan boleh turun kepada 28,000 rpm. Peminat yang lebih besar akan memperlahankannya lebih jauh.
Anda harus sentiasa memikirkan tentang beban apabila anda memilih motor untuk projek anda.
Reka Bentuk Motor
Reka bentuk motor juga mempengaruhi rpmnya. Motor tanpa teras mikro menggunakan gegelung tanpa teras yang ringan. Reka bentuk ini memberikan beberapa ciri istimewa:
Pecutan pantas dan kecekapan tinggi kerana binaan yang ringan
Inersia rendah, yang bermaksud motor bertindak balas dengan pantas kepada perubahan kelajuan
Operasi lancar dan mantap, berkat tork cogging yang dikurangkan
Output kuasa tinggi dalam saiz yang kecil, yang membantu dalam ruang yang sempit
Motor dengan magnet yang kuat, jenis belitan khas dan pemutar kecil boleh berputar lebih cepat. Reka bentuk tanpa teras juga bermakna kurang bunyi dan keluk kelajuan yang lebih lancar. Anda akan melihat manfaat ini dalam peranti seperti dron, alatan perubatan dan robotik, yang paling penting kelajuan dan kawalan.
Mengukur RPM
Penggunaan Takometer
Takometer membantu anda mengetahui kelajuan motor berputar. Alat ini menunjukkan kelajuan serta-merta dan sangat tepat. Sesetengah takometer digital menggunakan laser untuk memeriksa pergerakan. Anda halakan laser ke tempat berkilat pada motor. Skrin kemudian menunjukkan nombor rpm. Takometer ini boleh mengukur kelajuan dari 10 hingga 99,999 rpm. Mereka bekerja dari kira-kira 50mm hingga 200mm jauhnya. Anda tidak perlu menyentuh motor, jadi tiada seretan tambahan.
Ciri |
Penerangan |
taip |
Takometer digital bukan sentuh |
Julat Pengukuran RPM |
10.0 hingga 99,999 RPM |
Kaedah Pengukuran |
Tidak mengganggu, menggunakan laser |
Paparan |
Lampu Latar LCD, menunjukkan RPM dan kiraan revolusi |
Jarak Sasaran |
50mm hingga 200mm |
Hayat Bateri |
Operasi berterusan selama 12 jam |
Jika anda memerlukan hasil yang lebih tepat, anda boleh menggunakan penjana takometer DC. Alat ini menukar kelajuan putaran kepada isyarat voltan. Ia bagus untuk makmal dan sistem servo.
Kaedah DIY
Anda boleh menyemak rpm di rumah atau di dalam kelas dengan pelbagai cara. Anda mungkin menggunakan sensor optik untuk mengesan tanda pada aci berputar. Anda boleh membina pembilang RPM dengan pembilang dan nombor LED. Sesetengah apl telefon menggunakan kamera anda untuk mengetahui rpm.
Petua: Penderia optik dan apl telefon adalah pantas dan mudah digunakan. Anda tidak memerlukan alat khas, dan persediaan adalah mudah.
Anda juga boleh menggunakan penderia jarak atau periksa EMF belakang untuk mendapatkan cara yang murah untuk mengukur kelajuan. Mengira dengan jam yang pantas membantu anda memperoleh hasil yang baik, walaupun pada kelajuan perlahan.
Mengira daripada Spesifikasi
Anda boleh meneka rpm menggunakan penarafan Kv dan voltan yang anda gunakan. Penarafan Kv memberitahu anda berapa kali motor berputar untuk setiap volt. Berikut ialah formula mudah:
RPM = Kv × Voltan
Sebagai contoh, jika motor anda mempunyai Kv 1000 dan anda menggunakan 10 volt, rpm ialah 10,000. Jika anda mempunyai motor 2300Kv dan bateri 14.8V, rpm adalah kira-kira 34,040. Sentiasa lihat data pembuat untuk jawapan terbaik. Dengan cara ini, anda boleh mengetahui kelajuan sebelum anda menghidupkan motor tanpa teras mikro anda.
Mengapa RPM Penting
Prestasi
RPM adalah penting untuk keberkesanan motor anda. Jika anda menggunakan motor tanpa teras mikro, anda mahu ia bergerak pantas dan lancar. Rpm yang lebih tinggi membolehkan motor bertindak balas dengan cepat. Ini bagus untuk perkara yang memerlukan kelajuan dan ketepatan, seperti robot atau alat kecil. Jadual di bawah menunjukkan cara rpm mengubah prestasi:
Spesifikasi |
Nilai |
Voltan Ternilai |
3.0V |
Kelajuan Dinilai |
14,000 ± 2,500 rpm |
Dimensi |
11.9mm x 4.6mm x 4.9mm |
Kesesuaian Aplikasi |
Robotik dan peranti elektronik kecil |
Kesan terhadap Prestasi |
RPM yang lebih tinggi membawa kepada penggerak dan responsif yang lebih pantas, penting untuk ketepatan dan pergerakan pantas. |
Anda mendapat lebih daripada sekadar kelajuan dengan motor ini. Motor tanpa teras mikro bermula dan berhenti dengan cepat. Mereka memberikan kuasa yang kuat dalam saiz yang kecil. Ia berjalan lancar, jadi anda boleh mengawalnya dengan mudah. Motor ini juga mengendalikan haba dengan baik, yang membantu mereka bertahan lebih lama.
Ciri |
Penjelasan |
Kelajuan Putaran |
Naik dengan lebih banyak denyutan input; kelajuan perlahan boleh menyebabkan masalah. |
Muatan Kesan Tork |
Beban berat membuatkan motor berputar lebih perlahan. |
Aplikasi Voltan |
Lebih banyak voltan menjadikan motor berputar lebih laju. |
Nota: rpm tinggi boleh bermakna kurang tork dan lebih banyak penggunaan kuasa. Anda perlu mengimbangi kelajuan dengan kekuatan dan kecekapan.
Faktor Prestasi |
Penerangan |
RPM tinggi |
Motor tanpa biji boleh bergerak dengan sangat pantas tetapi memerlukan penggunaan yang teliti untuk mengelakkan kerosakan. |
Tork |
Jika rpm naik, tork boleh turun. |
Penggunaan Kuasa |
Kelajuan yang lebih pantas menggunakan lebih banyak kuasa, yang boleh mengurangkan kecekapan. |
Kesesuaian Aplikasi
Anda perlu memilih rpm yang sesuai untuk projek anda. Peranti yang berbeza memerlukan kelajuan yang berbeza. Dron memerlukan rpm tinggi untuk berputar pantas dan terangkat. Peranti perubatan memerlukan motor yang senyap dan stabil. Mainan memerlukan motor yang selamat dan tidak terlalu laju. Jadual di bawah menunjukkan cara rpm sesuai dengan setiap penggunaan:
Permohonan |
Julat RPM |
Ciri-ciri Utama |
Drone |
Sehingga 30,000 |
Nisbah kuasa-kepada-berat yang tinggi, ringan, kecekapan tinggi untuk penerbangan lanjutan. |
Peranti Perubatan |
Berbeza-beza |
Bunyi rendah, kawalan tepat, kebolehpercayaan untuk tugas kritikal. |
mainan |
Sehingga 33,000 |
Saiz padat, operasi yang cekap untuk alat kawalan jauh dan model. |
Dron: rpm tinggi membantu mereka mengangkat dan bergerak pantas.
Peranti perubatan: Rpm yang lebih rendah menjadikannya senyap dan stabil.
Mainan: rpm sederhana menjadikannya menyeronokkan dan selamat.
Sentiasa semak berapa rpm yang diperlukan oleh projek anda. Memilih kelajuan yang betul membantu peranti anda berfungsi dengan baik dan bertahan lebih lama.
Anda telah mengetahui bahawa motor tanpa teras mikro berputar dari 20,000 hingga 66,000 rpm. Kelajuan bergantung pada voltan, beban, dan cara motor dibina. Sentiasa lihat lembaran data untuk mencari rpm yang dinilai. Anda juga harus mengukur kelajuan untuk projek anda. Jadual di bawah menunjukkan perkara utama:
Aspek Utama |
Butiran |
Julat RPM |
20,000–66,000 rpm biasa |
Faktor Mempengaruhi |
Voltan, beban, reka bentuk motor |
Pengukuran |
Tachometer, DIY atau pengiraan |
Kesesuaian Aplikasi |
Dron, perubatan, robotik, mainan |
Pastikan rpm sepadan dengan keperluan projek anda. Memilih kv yang betul dan menyemak spesifikasi boleh menghentikan masalah motor.
Soalan Lazim
Apakah maksud 'tanpa teras' dalam motor mikro?
Motor tanpa teras menggunakan gegelung tanpa teras besi. Anda mendapat tindak balas yang lebih cepat dan kurang berat. Reka bentuk ini membantu motor berputar dengan cepat dan lancar.
Bolehkah anda mengawal rpm motor tanpa teras mikro?
Ya, anda boleh mengawal rpm dengan menukar voltan atau menggunakan pengawal motor. Voltan yang lebih rendah memperlahankan motor. Voltan yang lebih tinggi menjadikannya berputar lebih cepat.
Mengapa rpm menurun apabila anda menambah beban?
Apabila anda menambah beban, motor bekerja lebih keras. Kelajuan menurun kerana motor memerlukan lebih kuasa untuk memusing berat tambahan. Anda melihat rpm yang lebih rendah dengan beban yang lebih berat.
Bagaimana anda tahu jika motor anda berputar terlalu laju?
Anda mungkin melihat haba tambahan, bunyi atau getaran. Motor mungkin tidak bertahan lama. Sentiasa semak had rpm pengeluar untuk memastikan motor anda selamat.
Apa yang berlaku jika anda menggunakan terlalu banyak voltan?
Terlalu banyak voltan boleh memanaskan motor. Anda mungkin merosakkan belitan atau memendekkan hayat motor. Sentiasa gunakan voltan yang disyorkan untuk operasi yang selamat.